
Fターム[3D232DE14]の内容
走行状態に応じる操向制御 (73,124) | 制御出力パターン (1,729) | 制御時間の設定 (37)
Fターム[3D232DE14]に分類される特許
1 - 20 / 37
車両用操舵装置及び荷役車両
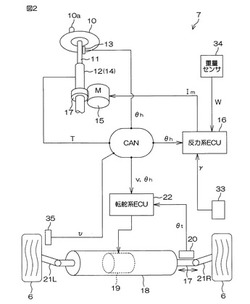
【課題】車両旋回時、特にハンドルの戻し時に運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、車体のヨー角を検出するヨー角検出部33と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、ヨー角検出部33によって検出された車体のヨー角の変化に基づいて車体の旋回量を観測し、観測された旋回量が基準角以上であれば、前記操舵部材に付与する操舵反力を、通常よりも増大させる。
(もっと読む)
ステアリング装置、産業車両およびプログラム

【課題】産業車両の発進時に運転者が意図しない方向に進んでしまうのを防止する。
【解決手段】フォークリフト1のステアリング装置5では、フォークリフト1に運転者が存在しない(S120:NO)という条件が成立した場合に、操舵輪53の舵角が基準となる基準角まで戻る復帰制御が行われる(S150〜S230)。これにより、上記条件の成立により復帰制御が行われることを知る運転者にとっては、フォークリフト1の進行方向が復帰制御により基準角に応じた方向になっていることを認識できるため、フォークリフト1の発進時に運転者が意図しない方向に進んでしまうようなことがなくなる。
(もっと読む)
電動パワーステアリング装置
【課題】電動パワーステアリング装置において、モータに電流を流す通電路に設けた開閉リレーが溶着等により閉故障した場合、安全に操舵アシストを継続して、運転者の感じる不便を軽減する。
【解決手段】リレー故障検出部61により開閉リレー48の閉故障が検出されると、制御態様変更部80は、目標電流演算部71、電流指令値演算部72、PWM制御部73に対して、回路故障抑制操舵アシスト制御の実行を指令する。回路故障抑制操舵アシスト制御時においては、モータ駆動回路40の故障が抑制されるように、モータ20の上限電流Imax、あるいは、上限電圧Vmax、あるいは、上限電力Pmax、あるいは、目標電流I*、あるいは、電圧指令値V*が低減される。
(もっと読む)
操舵力制御装置
【課題】最小限の構成による簡素な構成で、車両姿勢が不安定となったときに適切に操舵補助力を付加し、ステアリング操作による車両の姿勢の安定化を促進させることのできる操舵力制御装置を提供すること。
【解決手段】電動パワーステアリング(10)を備えた車両(1)において、前輪(2L,2R)の左右車輪速差、または後輪(4L,4R)の左右車輪速差が所定車輪速差αより大、または当該左右車輪速差の変化率が所定変化率βより大であるような場合に(S3)、所定時間の間(S9)低車輪速側に操舵補助力を付加する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を好適に維持しつつ、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】低減時間調整部は、「負の値」を有するγ軸電流増減値を積算制御部に出力してγ軸電流指令値Iγ**(Iγ*)の低減を許可した時点から、所定時間t_thの経過をもって、新たなγ軸電流増減値の積算によるγ軸電流指令値Iγ**の低減を許可する。そして、低減時間調整部は、γ軸電流指令値Iγ**に基づいて、当該γ軸電流指令値Iγ**の低減調整処理に用いる上記の所定時間t_thを変更する。
(もっと読む)
電動パワーステアリング装置
【課題】モータを駆動する各相電流指令値のゼロクロス時においても、モータからの異音の発生することがなく、且つ操舵フィーリングの良い電動パワーステアリング装置を提供すること。
【解決手段】デッドタイム補償演算手段は、電流指令値が負値からゼロクロス近傍の所定範囲に属する値になった場合には、正値の前記デッドタイム補償量を各相DUTY指令値に加算し、電流指令値が正値からゼロクロス近傍の所定範囲に属する値になった場合には、負値の前記デッドタイム補償量を各相DUTY指令値に加算する。
(もっと読む)
電動パワーステアリング
【課題】ステアリング機構の操舵力を電動モータでアシストするアシスト制御を行うシステムにおいて、路面状態に応じた適正なアシスト制御を行うことができるようにする。
【解決手段】車両が走行する路面状態(例えば、舗装路、雪道、草原、岩場等)に応じて運転者が路面モード選択スイッチ17を操作することで、車両が走行する路面状態に対応した路面モード(例えば、舗装路モード、雪道モード、草原モード、岩場モード等)を選択する。そして、路面モード選択スイッチ17で選択された路面モードに応じてアシスト制御の制御特性(例えば、車速と操舵トルクとアシストトルクとの関係)を変更することで、車両が走行する路面状態に応じた適正なアシスト制御を行う。その際、路面モード選択スイッチ17で路面モードが切り替えられた場合に、ステアリング機構の操舵角が中立位置でないときには、アシスト制御の制御特性の変更を禁止する。
(もっと読む)
電動パワーステアリング制御装置
【課題】振動抽出フィルタや制御ゲインを、外乱振動抑制効果を最適にするように可変化し、モータの発生するトルクリップルやコギングトルクなどの外乱振動成分を十分に低減することが可能である。
【解決手段】操舵トルクを示す検出操舵トルク信号Tspに基づいて目標電流Itを演算するアシストマップ20と、目標電流Itに基づいてモータ5に流れる電流を制御する電流制御手段3と、操舵トルク信号Tsrをフィルタ処理することで振動成分信号を出力する振動抽出フィルタ8と、振動成分信号に基づいて外乱補償指令Trcを演算するBPFゲイン9と、モータ5の回転速度に基づいて振動抽出フィルタ8のフィルタ周波数を補正するBPF周波数マップ15とを備え、操舵トルク信号Tsrに外乱補償指令Trcを加算した信号を新たに操舵トルク信号としてアシストマップ20が処理を行なう。
(もっと読む)
車両の制御装置
【課題】操舵伝達比可変装置を備える車両においてロック機構に大きな負荷が加わることを防止する。
【解決手段】転舵輪に連結された操舵出力軸15に対し操舵入力軸12と操舵出力軸との相対回転を促す駆動力を付与可能なモータ202と、一対の係合部材203a,203bにより上記相対回転を抑制可能なロック手段203とを含む操舵伝達比可変装置200を備えた車両において、制御装置100は、舵角に対応付けられた車両の操舵状態を特定する特定手段と、上記相対回転が抑制されない非ロック状態から相対回転が抑制されるロック状態へ操舵伝達比可変装置の状態が切り替わるロック制御期間において、特定された操舵状態に基づいて規定される所定の舵角エンド近傍領域でモータを相対的に回転させ易くする制御手段とを具備する。
(もっと読む)
昇圧装置
【課題】過大な電流が過渡的に流れるときに、この電流に応じて昇圧のための制御ゲインを減少させることで、必要以上に出力を制限することを無くし、商品性の高い昇圧装置を提供する。
【解決手段】負荷側の要求値に基づいて設定された目標電流値(Iobj)から、昇圧回路(130)の状態量に応じて入力電流値(Iin)の制限値となる入力制限電流値(Iinmax)を設定し、入力電流値(Iin)と前記入力制限電流値(Iinmax)に応じて前記出力電圧値(Vout)のフィードバック制御ゲイン(Pv)を算出し、制御手段(120)へ出力する補正手段(110)とを備える。この補正手段(110)は、入力電流値(Iin)と入力制限電流値(Iinmax)との差(ΔIin)が所定値(ΔIinA,ΔIinB)よりも小さくなるに従って、目標電圧値(Vobj)に対応するフィードバック制御ゲイン(Po)を減少させるように構成する。
(もっと読む)
アンダーステア検出装置及び検出方法
【課題】横Gセンサを用いず、低コストでアンダーステアの検出精度が向上できると共に、アンダーステアの誤検出を確実に防止できるアンダーステア検出装置及び検出方法を提供する。
【解決手段】ヨーレートと規範ヨーレートの値に応じてアンダーステア検出の禁止及びアンダーステア検出禁止の解除を実行するアンダーステア検出禁止判定手段15を備え、アンダーステア検出禁止判定手段は、以下の条件1、条件2のいずれかが成立時にアンダーステア検出の禁止を行い、
条件1:ヨーレートの絶対値が規範ヨーレートの絶対値よりも大きく、かつヨーレートと規範ヨーレートが同符号の場合
条件2:ヨーレートと規範ヨーレートが異符号の場合
ヨーレートの絶対値と規範ヨーレートの絶対値との差分値が予め定めた閾値以下の状態で所定時間継続した場合にアンダーステア検出の禁止解除を行う。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】故障誤判定を抑制することにより当該故障検出に対する信頼性を高めつつ故障電流に対する保護機能の向上が図られる電動パワーステアリング装置の制御装置を提供する
【解決手段】FETの駆動が制限された状態で故障検出条件が非成立である旨判定される場合(ステップS202でNO)には、モータの端子電圧に基づき設定される制限解除条件が成立する旨判定されるとき(ステップS209でYES)にのみ、FETの駆動制限が解除される。このため、FETの駆動が制限された状態で故障検出条件が非成立である旨判定される場合に、当該制限が即時に解除されることはない。したがって、故障誤判定が抑制されることにより、当該故障検出に対する信頼性を高めつつ故障電流に対する保護機能の向上が図られる。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】円滑なモータ回転及び高精度の電流検出を担保しつつ電圧利用率の改善を図ることのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、駆動回路において各相に対応する低電位側の各FETの何れかのオン時間が相電流値の検出時間よりも短くなる場合には、当該FETに対応する電流検出不能相以外の二相の相電流値に基づいて、その電流検出不能相の相電流値を推定する(ブラインド補正)。そして、そのブラインド補正による電流検出を実行する場合には、電流検出不能相に対応したスイッチングアームのスイッチング状態を保持するとともに、電流検出不能相以外の二相において各FETの作動により生ずる電力損失を補償するようなモータ制御信号を出力する。
(もっと読む)
鞍乗り型車両のパワーステアリング装置
【課題】デフロック装置を備えた車両に設けられる電動パワーステアリング装置の温度上昇を抑制して、デフロック時以外で電動パワーステアリング装置の動作が制限されるのを防止する。
【解決手段】上端にステアリングハンドル16が取り付けられたステアリングシャフト17に連結されて操舵力を補助する補助力を発生させる電動パワーステアリング装置12と、ディファレンシャル装置63の差動状態および非差動状態(デフロック)を選択するデフロック手段とを備える。デフロックセンサ64によってデフロックが検出された時に、電動パワーステアリング装置12で発生される補助力の最大値を所定の制限値に低減させるECU100aを備える。ECU100aは、デフロックセンサ64によりデフロックが解除されたことを検出した時に補助力の最大値の制限を解除する。
(もっと読む)
操舵支援装置
【課題】操舵機構に付与される操舵力とドライバの操舵操作との干渉時に積分制御を適切に終了する操舵支援装置を提供する。
【解決手段】操舵支援装置は、環境認識手段110と、目標走行位置設定手段120と、自車横位置認識手段130と、目標走行位置に対する自車両の横位置の偏差算出手段140と、偏差積分手段150と、偏差の積分値に基づく目標操舵力設定手段180と、目標操舵力に基づいて操舵機構に操舵力を付与する操舵制御手段190と、操舵操作力検出手段23と、目標操舵力の方向と操舵操作力の方向とが異なったときに、偏差積分手段150による積分値の加算を停止させる積分停止手段181と、自車両に対外力推定手段170とを備え、操舵力設定手段180は、偏差積分手段が積分値の加算を停止した後、所定の積分停止時間の経過後に積分値に基づいた操舵力を低下させるとともに、横方向外力の増加に応じて積分停止時間を延長する構成とする。
(もっと読む)
電動パワーステアリング装置
【課題】端当て時(操舵限界に達した時)の衝撃を十分に緩和することができる電動パワーステアリング装置を提供する。
【解決手段】ステアリング系にアシストトルクを伝達可能な電動モータ12と、運転者の操舵トルクを検出するトルク検出手段14と、該トルク検出手段14で検出した操舵トルクに応じて前記電動モータ12を駆動制御する制御手段15と、を備えた電動パワーステアリング装置であって、前記電動モータ12のトルクを検出し、検出したトルクの変化率が所定値を超えたときに、操舵角が操舵限界に達したと検知する検知手段23を備え、前記制御手段15は、前記検知手段23で操舵角が操舵限界に達したことを検知したときに、操舵角の絶対値が小さくなる方向に前記電動モータ12を駆動制御する逆アシスト制御を行う。
(もっと読む)
運転支援装置
【課題】違和感の少ない運転支援制御を実現することのできる運転支援装置を提供する。
【解決手段】運転支援装置は、車輪を転舵させるアクチュエータ15と、車両の運転支援制御のためにアクチュエータの制御値を決定する決定手段2,9と、決定手段によって決定された制御値の時間変化が所定範囲外である場合に、制御値の時間変化を制限するための制限値を決定する制限手段2と、決定手段により決定された制御値または制限手段により決定された制限値に基づいて、アクチュエータを制御する制御手段14と、を備え、制限手段は、運転支援制御の開始時または終了時に適用する制限値を、車両走行状態または車両運転状態に応じて異ならせる。
(もっと読む)
電動パワーステアリング装置
【課題】長時間に亘る保舵操作を効果的にアシストすることのできる電動パワーステアリング装置を提供すること。
【解決手段】マイコン21は、操舵状態(ステアリング操作の状態)に応じて、そのパワーアシスト制御の基礎となる操舵トルクτを補正する操舵トルクシフト制御を実行し、当該操舵状態が「保舵」である場合には、その補正後の操舵トルクτ´によって、基本アシスト制御量Ias*が増大するような操舵トルクシフト制御量εtsを演算する。また、マイコン21は、保舵状態の積算時間を演算する。そして、その保舵積算時間が大きい(長い)ほど、その操舵トルクシフト制御における操舵トルクτの補正量、即ち操舵トルクシフト制御量εtsを増大させる。
(もっと読む)
電動パワーステアリング装置
【課題】端当て保護制御等のフィードバック制限を解除したときの異音発生や操舵フィーリングの悪化を抑制することができる電動パワーステアリング装置を提供する。
【解決手段】ステアリング機構が操舵限界に達したと判断したとき、端当て保護制御としてパルス幅変調信号のデューティを制限するデューティ制限制御を行うことで、電流制御部63のフィードバック制御を制限すると共に、デューティ制限制御を行っている間、電流制御部63の積分値の過去値を一定値にリセットしたり、デューティ制限制御の解除時に当該過去値を一定値にリセットしたりすることで、制限制御解除時における電動モータ12の駆動電流の急変を抑制する。
(もっと読む)
操舵力制御装置
【課題】最小限の構成による簡素な構成で、車両姿勢が不安定となったときに適切に操舵補助力を付加し、ステアリング操作による車両の姿勢の安定化を促進させることのできる操舵力制御装置を提供すること。
【解決手段】電動パワーステアリング(10)を備えた車両(1)において、前輪(2L,2R)の左右車輪速差、または後輪(4L,4R)の左右車輪速差が所定車輪速差αより大、または当該左右車輪速差の変化率が所定変化率βより大であるような場合に(S3)、所定時間の間(S9)低車輪速側に操舵補助力を付加する。
(もっと読む)
1 - 20 / 37
[ Back to top ]