
Fターム[3D232EA08]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(操舵対象) (2,739) | 4WSと2WSの切り換え (20)
Fターム[3D232EA08]に分類される特許
1 - 20 / 20
四輪操舵制御装置
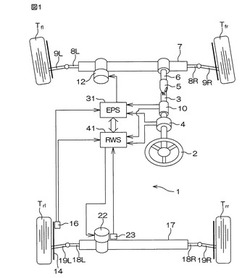
【課題】パワーステアリング装置が故障する場合に備えて、四輪操舵装置の後輪の転舵機能を利用して、車両の転舵ができる四輪操舵制御装置を提供する。
【解決手段】操舵部材2の操作に基づく操舵トルクを検出するトルクセンサ10と、操舵角を検出する操舵角センサ4と、トルクセンサ10の検出値に基づいて前輪を転舵するための補助力を得る操舵補助制御部31と、操舵角センサ4若しくはトルクセンサ10の検出値に基づいて後輪を転舵制御する転舵制御部41とを備え、転舵制御部41は、操舵補助制御部31の機能に故障があると判定された場合に、後輪を逆相側でのみ転舵制御する。
(もっと読む)
農業用トラクタ

【課題】農業用トラクタにおいて、操舵トルクセンサが故障しても確実に操舵力補助制御を継続できるようにする。
【解決手段】農業用トラクタは、エンジンが搭載され且つ前後四輪にて支持された走行機体と、走行機体に設けられた操縦ハンドルと、電動モータ84を有する電動操舵機構と、操縦ハンドルの操舵トルクを検出する操舵トルクセンサ85とを備える。操舵トルクセンサ85の検出結果に基づき電動モータ84の出力を増減させ、電動操舵機構を介して左右両前車輪を操舵する。走行機体の前後方向の傾斜角を検出するピッチングセンサ104を備える。ピッチングセンサ104の検出結果に基づき電動モータ84の出力を調節可能に構成する。
(もっと読む)
車両の走行制御装置
【課題】車両の旋回走行時に、転舵機構を駆動するアクチュエータ系に失陥が生じる場合であっても、適切な走行制御を維持する。
【解決手段】走行制御装置は、前輪FL、FR及び後輪RL、RRの舵角を制御可能な転舵機構15、18を有する車両10の装置であって、転舵機構を駆動させる第1転舵手段400、500、600及び第2転舵手段300、310、320、330と、第1及び第2転舵手段が転舵機構を駆動させる際の動作の態様を制御する制御手段100と、第1転舵手段において失陥が生じたことを検出する検出手段410、510、610とを備え、制御手段は、第1転舵手段に失陥が生じた場合、車両の運動状態に対応する状態量が、第2転舵手段の動作により適用可能な範囲内で設定する目標状態量となるように、第2転舵手段を動作させる。
(もっと読む)
車両の挙動制御装置
【課題】各種状態制御量の制御を介して最終的に車両状態量を制御する各種のデバイスが故障した場合において、故障したデバイスに対応する状態制御量を中立点に復帰させるまでの過渡的過程における車両挙動を安定に維持する。
【解決手段】車両の挙動制御装置(100)は、ドライバによる操舵とは無関係に前輪の舵角を変化させることが可能な前輪舵角可変手段及びドライバによる操舵とは無関係に後輪の舵角を変化させることが可能な後輪舵角可変手段のうち一方が異常状態にあるか否かを判定する判定手段と、一方が異常状態にあると判定された場合に、この一方に対応する異常側車輪の舵角を中立点に戻す舵角戻し手段と、異常側車輪の舵角を中立点に戻す過程において、異常側車輪の舵角の戻し量に応じて、異常状態にない他方に対応する正常側車輪の舵角と左右制駆動力差とを制御する制御手段とを具備する。
(もっと読む)
車両の操舵装置および操舵方法
【課題】前後どちらの転舵系が故障しても、操舵応答に大きく寄与する前輪の転舵を補償することにより、操舵応答が大きく悪化するのを回避し得るようになす。
【解決手段】A側車輪3の操舵アクチュエータ27を含む転舵機構と、B側車輪4の操舵アクチュエータ28を含む転舵機構との間を、所要に応じ機械的に結合可能なクラッチ41を設ける。A側車輪転舵系およびB側車輪転舵系が共に正常である場合、コントローラ12はクラッチ41を解放すると共に、操舵角θおよび車体速Vを基に演算した目標挙動が達成されるよう、A側操舵アクチュエータ27およびB側操舵アクチュエータ28を個々に動作させ、右輪3,4を個別に転舵する。A側車輪転舵系またはB側車輪転舵系が故障した場合、コントローラ12はクラッチ41を締結する。この締結により、故障していない正常な転舵系の側操舵アクチュエータ27または28を用いて、故障している側の車輪を引き続き転舵することができ、前輪の転舵を補償して操舵応答の大きな悪化を回避することができる。
(もっと読む)
四輪操舵装置
【課題】後輪21が脱輪した場合にも容易に復帰可能な四輪操舵装置1を提供する。
【解決手段】運転者の操舵に応じて後輪21を転舵するアクチュエータ25と、所定車速以下でアクチュエータ25による後輪21の転舵を禁止する後輪転舵禁止手段8aとを備えた四輪操舵装置1において、後輪21に配置された懸架装置10の伸長量を検出するストロークセンサ26を設け、後輪転舵禁止手段8aは、伸長量が所定値以上の場合には、後輪21の転舵を禁止しない。後輪21が脱輪した場合には懸架装置10が通常の場合より伸長するので、その伸長量が所定値以上か否かを判定することにより、後輪が脱輪しているか否かを検出することができる。後輪が脱輪している場合に、後輪転舵禁止手段は後輪の転舵を禁止しないので、後輪を転舵させることができ脱輪から容易に復帰することができる。
(もっと読む)
レーンキープ又はレーン逸脱防止システム
【課題】車両挙動の安定を確保しながら、走行レーンからの逸脱を抑制してレーンキープすること。
【解決手段】ステアリングハンドル3による操舵を電動機4で補助し、前記ステアリングハンドル3の操作角に対する前輪1L、1Rの転舵角との舵角比を変化させる舵角比可変機構113を有する電動パワーステアリング装置110と、後輪2L、2Rのトー角を変更可能とするトー角変更装置120L、120Rと、走行レーンをキープする際に設定される目標とのずれを判定する操舵制御ECU130と、操舵制御ECU130の判定結果に基づいて、前記舵角比可変機構113の舵角比及び前記後輪2L、2Rのトー角をそれぞれ制御する。
(もっと読む)
車両用駐車支援装置、及び車両用駐車支援方法
【課題】車両の後退軌跡が駐車位置までの最適軌跡を容易に維持することができる車両用駐車支援装置を提供する。
【解決手段】車両の駐車支援を行う車両用駐車支援装置であって、車両の後方を撮像する後方撮像部と、車両の駐車位置を認識する駐車位置認識部と、駐車位置認識部が認識した駐車位置までの最適軌跡を算出する最適軌跡算出部と、最適軌跡算出部が算出した最適軌跡の回転半径が前輪のみの操舵による最小回転半径よりも小さい場合、最適軌跡を維持するように、前輪の自動操舵を行うと共に後輪の自動操舵を行う駐車自動操舵部とを備える。
(もっと読む)
作業車
【課題】車速条件を考慮して複数の操舵モードへの移行の可否を判定することにより安全性を高めようとする。
【解決手段】操舵モード選択手段(92)の操作状態に基づいて、前輪操舵モード(FWS)、後輪操舵モード(RWS)、四輪操舵モード(4WS)を備えた作業車において、作業車の車速検出手段(VS)を設け、前記車速検出手段(VS)が所定速度未満の車速を検出し、副変速機構(7)の油圧クラッチ変速部(11)が低速位置あるときに前記後輪操舵モード(RWS)又は四輪操舵モード(4WS)への設定を許可し、前記後輪操舵モード(RWS)又は四輪操舵モード(4WS)の設定中、車速検出手段(VS)が所定速度以上の車速を検出するとき、前記副変速機構(7)の油圧クラッチ変速部(11)の低速位置から高速位置への変速を牽制する。
(もっと読む)
駐車支援装置
【課題】4WS車においてもクロソイド曲線を含む経路を用いることが可能な駐車支援装置の提供。
【解決手段】本発明は、前後輪が独立に転舵可能な4WSモードを備える車両に適用される駐車支援装置10において、目標位置に車両を導くための該車両の経路を算出する経路算出手段と、前記経路算出手段により算出される経路に基づいて前記目標位置への車両の駐車走行を支援する支援手段とを備え、前記経路算出手段により算出される経路は、前後輪が前後逆相で転舵されることが予定される経路を含み、該経路は、車両の前後方向の中心線上の定点であって旋回中心から前記中心線に下ろした垂線の交点である定点がクロソイド曲線の軌跡を描く区間を含むことを特徴とする。
(もっと読む)
4輪操舵機構を搭載した車両の操舵制御装置
【課題】前進時は4WSで、後退時は2WSで操縦される車両に於いて、車両の後退時と前進時の軌道が異なることに起因して車両の軌道の把握・予測がし難くなることと、車両が周囲の障害物に接触する可能性が高くなることを回避できるようにすること。
【解決手段】本発明の車両の4輪操舵制御装置は、車両が進行方向を検出する走行方向検出部と、車両が後退していることを記憶する記憶部とを含み、車両の後退が検出されたときには後輪の舵角が0になるよう後輪操舵装置を制御し、記憶手段により車両の後退が記憶されているときに車両の前進が検出されたときには所定の条件が成立するまで後輪の舵角が0に維持されるよう後輪操舵装置を制御することを特徴とする。
(もっと読む)
回転可能な車両
【課題】その場で回転可能な車両の意に反する回転を防止する。
【解決手段】全車輪1a〜1dを別個に回転駆動する各モータ2a〜2dと、各車輪を別個に転舵する各アクチュエータ5a〜5dとを設けると共に、回転許可スイッチ7と回転方向操作レバー8とアクセルペダル9とからの回転させるための各信号の入力条件が揃った場合にのみその場での回転制御を行う。それら各条件を満たす操作を行う各操作子をそれぞれ分けて設けられており、いずれか1つまたは2つを誤って操作したとしても回転を実施しないため、不用意にその場で回転し始めてしまうことを防止することができる。
(もっと読む)
操舵制御装置
【課題】運転者が意図する運転内容と運転者による操舵操作の内容とが矛盾する場合に、運転者が意図しない運転内容を実現させてしまうのを防止する操舵制御装置を提供すること。
【解決手段】前後輪の操舵を制御可能な操舵制御装置100は、運転者が意図する車両の運転内容を事前に判断する運転内容判断手段10と、その運転内容と矛盾する操舵操作を禁止又は抑制する操舵操作制限手段14とを備える。
(もっと読む)
操舵制御装置
【課題】停車することなく連続的なモード切替を許容しつつ、モード切替時の後輪操舵アクチュエータへの負荷を低減すること。
【解決手段】本発明は、前後輪をそれぞれ独立に舵角制御し、走行中若しくは運転者による転舵中における2WSモードと4WSモードの連続的なモード切替を許容した操舵制御装置において、前輪若しくは後輪が中立位置にならない状態でモード切替を禁止することを特徴とする。
(もっと読む)
操舵制御装置
【課題】車両走行中で且つ操舵中である状況下でのモード切替を可能としつつ、車両走行中で且つ操舵中である状況下でのモード切替に起因した車両挙動の急変を適切に防止すること。
【解決手段】本発明による操舵制御装置は、転舵手段の転舵モードを切り替える転舵モード切替手段と、前記転舵モード切替手段により転舵手段の転舵モードが前輪転舵モードから前後輪同相転舵モードに切り替えられた場合に、車両走行中で且つ操舵中である状況下でモード遷移中の転舵角制御を行うモード遷移時制御手段とを備え、前記モード遷移時制御手段は、後輪の転舵角の変化量を、前輪転舵角と後輪転舵角との比に基づいて設定する。
(もっと読む)
操舵装置
【課題】操舵操作性に優れた操舵装置を提供すること
【解決手段】運転者が操舵操作を行う際に操作面10s上で移動させる操作部材12及び当該操作部材12の移動量を操舵操作量(操舵角θST)として検出する操舵操作量検出手段14が設けられた操舵入力手段10と、前輪WFL,WFRが操舵輪となる前輪操舵モードと後輪WRL,WRRが操舵輪となる後輪操舵モードとを切り替えて設定する操舵モード設定手段(電子制御装置40)と、検出された操舵操作量に基づいて制御対象の操舵輪の目標転舵角θreqを設定する目標転舵角設定手段(電子制御装置40)と、前輪操舵モード選択時に操舵入力手段10との機械的な連結無しに前輪を目標転舵角θreqとなるよう転舵させる前輪転舵角付与手段20と、後輪操舵モード選択時に操舵入力手段10との機械的な連結無しに後輪を目標転舵角θreqとなるよう転舵させる後輪転舵角付与手段30と、を備えること。
(もっと読む)
ステアリング装置、自動車、及びステアリング制御方法
【課題】通常の2輪操舵に近い操作性を確保しつつ、路肩への幅寄せを容易にする。
【解決手段】ステアリング操作に応じて前輪だけの転舵を開始して前輪舵角δfが飽和したら前輪舵角δfと逆方向に後輪の転舵を開始する駆動モードAと、ステアリング操作に応じて後輪だけの転舵を開始して後輪舵角δrが飽和したら後輪舵角δrと逆方向に前輪の転舵を開始する駆動モードBとを、極低速走行時に、何れか一方から他方へと切り替えて実行する。
(もっと読む)
車両用誘導経路探索装置
【課題】転者の優先する欲求、及び車両への負担を考慮しつつ、運転者への負担を極力低減した、簡単な車両の誘導が可能となる車両用誘導経路探索装置を提供する。
【解決手段】本発明は、車両の初期位置から目標位置までへの誘導経路を当該車両の運転者に提示する車両用誘導経路探索装置である。運転者は、自らの望む誘導経路の選択基準を入力しておく。初期位置から目標位置までへの誘導経路を複数割り出す誘導経路割り出し(S103)、割り出された誘導経路それぞれの誘導経路の特性を計算する(S104)。本発明の車両用誘導経路探索装置は、誘導経路の特性計算結果に基づいて入力された選択基準に沿う誘導経路を運転者に提示する。
(もっと読む)
車両の操舵装置
【課題】 車両の操舵装置において、ハイドロプレーニング現象の発生を抑制する。
【解決手段】 左右前輪FW1,FW2は、ステアリングシャフト11、ピニオンギヤ12およびラックバー13を介して、操舵ハンドル10の操舵操作に応じて転舵される。ECU35は、路面湿潤センサ34によって路面が湿潤状態にあることが検出されていること、および車速センサ32によって検出された車速Vが所定車速V1以上であることを条件に、ヨーレートセンサ33によって検出されたヨーレートγおよび前記車速Vを用いて、左右後輪RW1,RW2が左右前輪FW1,FW2と同じ場所を通るように目標後輪転舵角θr*を計算する。そして、左右後輪RW1,RW2は、電動モータ20により、前記目標後輪転舵角θr*に転舵される。その結果、左右後輪RW1,RW2は、左右前輪FW1,FW2によって水が押しのけられた水膜の薄い路面を通過することになる。
(もっと読む)
4輪アクティブステアシステム
【課題】 4輪アクティブステアシステムにおいて、複雑な制御を用いることなく、一方のアクティブステア手段の異常時の車両挙動特性の急変を抑制すること。
【解決手段】 前輪に補助舵角を付与する前輪側アクティブステア手段と、後輪に補助舵角を付与する後輪側アクティブステア手段と、ベース車両挙動特性から所望の車両挙動特性となるように補助舵角を付与する制御則に基づいて前記両アクティブステア手段に対し補助舵角指令を出力する4輪アクティブステア制御手段と、を備えた4輪アクティブステアシステムにおいて、前記アクティブステア手段のどちらか一方のみに異常が検出されたときは、異常が検出されたアクティブステア手段を停止し、前記所望の車両挙動特性との特性差が小さくなるように、正常な他方のアクティブステア手段の継続・停止を選択することとした。
(もっと読む)
1 - 20 / 20
[ Back to top ]