
Fターム[3D244AD21]の内容
Fターム[3D244AD21]に分類される特許
421 - 424 / 424
自動車の間隔制御システム
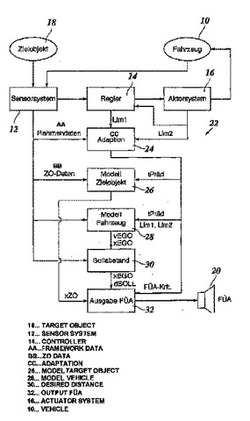
目標対象(18)および自己の車両(10)に関するデータを検出するためのセンサシステム(12)と,車両(10)の縦運動を制御するためのアクターシステム(16)と,目標対象(18)との間隔に関して定められた制御目標を維持するために,所定の介入限界(Lim1,Lim2)内においてアクターシステム(16)へ介入する制御器(14)と,制御目標が維持されない場合に,運転者に引受け要請を出力するための出力装置(20)とを有する,自動車のための間隔制御システムは,制御目標が維持されない対立状況を予測し,対立状況が発生する前に引受け要請(FUA)を作動させるための予測システム(22)を備えることを特徴としている。 (もっと読む)
車間距離制御を行う方法及び装置
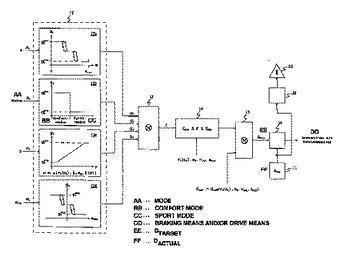
本発明は、車両内で距離を制御する方法及び装置に関する。本発明に従って、車両と前方走行車両との間の距離を表す距離変数の実際値(dact)が測定される。 さらに、距離変数のための複数の重み付け値(gi)が、車両の運転状況及び/又は車両の周囲状況及び/又は運転者の運転動作を表す入力変数(xi)に従って決定される。前記重み付け値から、距離変数のための設定値(dsetp)が決定され、これにより、車両の制動手段及び/又は駆動手段が、距離変数の測定実際値(dact)が決定設定値(dsetp)をとるよう制御される。本発明は、重み付け値(gi)を共に掛け合わせて、距離変数の設定値(dsetp)を決定することを特徴とする。
 (もっと読む)
(もっと読む)
車間距離制御を行う方法及び装置
本発明は、車間距離制御を行う方法及び装置に関し、これによれば、前記車両と前方走行車両との間の距離を表す距離変数の実際値(dact)が測定される。さらに、距離変数のための複数の重み付け値(gi)が、車両の運転状況及び/又は車両の周囲状況及び/又は運転者の運転動作を表す入力変数(xi)に従って決定され、前記重み付け値(gi)が、第1の計算ステップで論理的に結合されて、距離変数のための論理結合値(f)を形成する。距離変数のための設定値(dsetp)が論理結合値(f)から決定され、車両の制動手段及び/又は駆動手段が、距離変数の測定実際値(dact)が決定設定値(dsetp)をとるよう起動される。第1の計算ステップの後に第2の計算ステップが続き、ここで、論理結合値(f)が、予め定義された値の範囲に限定され、距離変数の設定値(dsetp)が、適宜限定される論理結合値(f)から決定される。 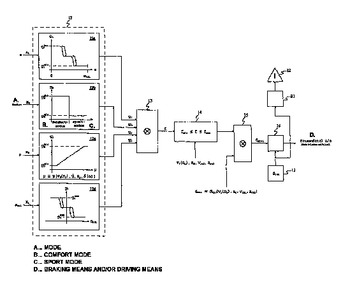 (もっと読む)
(もっと読む)
追従間隔制御を改良する方法
【課題】
追従間隔制御の快適性と安全性を向上させること。
【解決手段】
車両の追従間隔制御システムを改良する方法では、追従間隔制御の制動圧要件に車両の電子式制動制御システムのシステム制御が比較的にゆっくりな速度で行われるので、最高圧力増加率或いは減少率は超過しない。代用として、制動圧積分によりあらかじめ制動制御の計画が行なわれる。 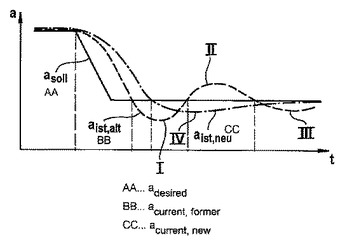 (もっと読む)
(もっと読む)
421 - 424 / 424
[ Back to top ]