
Fターム[3D246HA16]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 操舵状態 (1,157) | 運転者の操舵状態 (1,067) | ハンドル戻し操作 (8)
Fターム[3D246HA16]の下位に属するFターム
カウンタステア (3)
Fターム[3D246HA16]に分類される特許
1 - 5 / 5
車両の駆動力制御装置
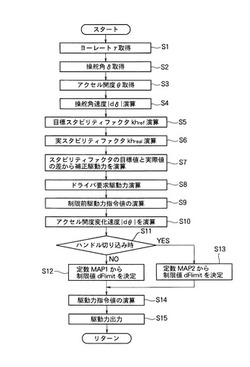
【課題】旋回性能と加減速性能とを両立させることができるように駆動力を制御する装置を提供する。
【解決手段】運転者の加減速操作に基づいて求められる要求駆動力を、操舵に基づいて求められる補正駆動力によって補正して駆動力を求める車両の駆動力制御装置において、前記操舵による旋回要求の度合いを検出する旋回要求検出手段(ステップS3,S4,S11)と、前記旋回要求の度合いに基づいて、前記補正駆動力による駆動力の補正を制限する駆動力補正制限手段(ステップS12,S13,S14)とを備えている。操舵に基づく駆動力の補正を、旋回要求の度合いに応じて変化させるので、旋回特性と加減速特性とを良好な状態に設定できる。
(もっと読む)
車両制御装置

【課題】 減速装置の応答遅れに伴うブレーキの引きずり感を抑制できる車両制御装置を提供する。
【解決手段】 ドライバのステアリング状態を検出する操舵角センサ112と、検出されたステアリング状態に基づいて車両に減速度を与えるブレーキECU102と、を有し、ブレーキECU102は、ステアリングホイールが第1の方向に操舵されたとき、検出されたステアリング状態に基づいてブレーキ液圧ユニット101を作動させて車両に減速度を与える減速制御部(ステップS4)と、ステアリングホイールが第1の方向に操舵された後に第1の方向と反対方向に操舵されたとき、ブレーキ液圧ユニット101による減速度を抑制する減速抑制制御部(ステップS6)と、を備えた。
(もっと読む)
車両横転防止制御装置および車両横転防止制御方法
【課題】 横転判断精度を高めることができる車両横転防止制御装置および車両横転防止制御方法を提供する。
【解決手段】 車両挙動を制御するために作動するブレーキ装置と、ドライバの操舵に基づいて車両に対し所定のロールが発生することを予測すると共に、ドライバによる操舵の切戻しを検出する操舵入力判断部23と、操舵の切戻しが検出されたときに横転判断を行うARP制御介入判断部29と、操舵入力判断部23により所定のロールが発生すると予測され、かつ、ARP制御介入判断部29により横転判断された場合、アクチュエータであるブレーキ装置を制御し横転防止制御を行うARP制御部22と、を備えた。
(もっと読む)
車両の制駆動力制御装置
【課題】 操舵力のヒステリシスを考慮した制御を行うことにより、高速走行時と低速走行時とのいずれにおいても、安定したステアリング性能を得ることができる車両の制駆動力制御装置を提供する。
【解決手段】 目標ヨーレートr_refとヨーレートセンサ4によって検出されたヨーレートrとの差分であるヨーレート差分Δrがヒステリシスしきい値r_hys以下か否かを判断する。このとき、目標ヒステリシスを実現する目標ヨーモーメントDYM_absを求め、この目標ヨーモーメントDYM_absを達成する左右輪WL,WRに対する制駆動力配分を算出する
(もっと読む)
車両の車速制御装置
【課題】所定の設定速度に制御しつつ旋回限界を超えずに安定した旋回を確保可能な車両の車速制御装置を提供する。
【解決手段】先行車との目標車間距離に対応する所定の設定車速に応じた第1の目標車速指令値Vacc を演算し、その第1の目標車速指令値Vacc となるように車両の速度制御を行う先行車追従制御と、車両が安定して走行可能な限界旋回状態に近づいたと判定すると車両の安定した旋回走行を維持するために必要な目標減速度を演算しその目標減速度に応じた制動力を車両に負荷する旋回安定制御を行う。このとき、上記旋回安定制御が演算した目標減速度に応じた第2の目標車速指令値Vcop と、上記先行車追従制御が演算した第1の目標車速制令値とのいずれか小さい値側の目標車速指令値となるように排他的に車両の速度を制御する。
(もっと読む)
1 - 5 / 5
[ Back to top ]