
Fターム[3D301AA46]の内容
車体懸架装置 (72,824) | 目的、機能 (15,449) | 操安、乗心地制御 (6,736) | 予見/プレビュー制御 (89) | 車両前方情報から前/後輪を制御 (27)
Fターム[3D301AA46]に分類される特許
21 - 27 / 27
車両の挙動制御装置
【課題】車両の挙動を変更可能なアクチュエータを道路特性情報に応じた適切な制御タイミングで作動させる。
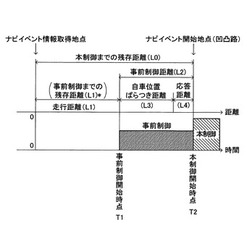
【解決手段】ナビゲーションECU11は、検出された自車両の現在位置と、記憶装置14に記憶されている進行先の凹凸路の開始位置間の距離が所定距離L0となった時点からの車両の走行距離L1を計算する。また、ECU11は、実際に走行した前後方向距離に対する距離の誤差の総和である自車位置のばらつき距離L3を計算し、アクチュエータ21eの作動応答遅れ時間T0内に車両が走行する距離である応答距離L4を計算する。そして、ECU11は、所定距離L0からばらつき距離L3および応答距離L4等を減算した値である残存距離L1*と、走行距離L1とを比較して、走行距離L1が残存距離L1*より大きくなったとき、アクチュエータ21eの事前制御開始情報をサスペンションECU23に供給する。
(もっと読む)
車両制御システム

【課題】段差を通過する際に、車両の速度と上下方向加速度との関係を示す特性値が快適さの臨界値を示す快適境界線に近くなるようにサスペンション制御を行うことによって、乗り心地と走行安定性とを高い次元で両立させることができ、段差に対して適切にサスペンション制御を行うことができるようにする。
【解決手段】道路の段差の段差情報を記憶する記憶手段と、該記憶手段に記憶されている段差の段差情報に基づいて段差制御を行うとともに、車両の速度と上下方向加速度との関係を示す特性値が快適さの臨界値に応じて変化するように制御量を変化させる段差制御手段とを有する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
出会い頭事故防止のための減速を促す車両用運転操作補助装置を提供する。
【解決手段】
車両用運転操作補助装置は、接近度合を表すリスクポテンシャルを算出し、リスクポテンシャルに応じてアクセルペダルに発生させる操作反力を制御する。また、自車両がスクールゾーン等の特定エリアに接近し、特定エリアとの距離が所定距離まで低下すると、自車両が仮想的なバンプを乗り越えるような感覚を運転者に与えるように、前輪および後輪のホイールシリンダをそれぞれ制御して制動力を発生させる。前輪の制動力制御を行った後、後輪の制動力制御を行い、自車両が仮想的なバンプを通過するときの減速度を擬似的に表現する。
(もっと読む)
車両制御装置およびカント状態判定方法
【課題】 車両の走行路のカント状態を精度よく速やかに判定可能とする車両制御装置およびカント状態判定方法の提供。
【解決手段】 車両1は、車速Vを検出するための車輪速センサ25と、車両1の横加速度Gを検出する横Gセンサ26と、車両1の操舵状態を検出するための操舵角センサ21および操舵トルクセンサ22と、少なくとも車両1の走行レーンを示す情報を含む走行環境情報を取得するためのナビゲーションシステム28と、検出された車速V、横加速度G、操舵状態および走行環境情報と、少なくとも車両1の走行レーンに関連付けられた教師信号とに基づいて車両1の走行路のカント状態を学習すると共に、車速V、横加速度G、操舵状態および走行環境情報に基づいて学習結果を用いたニューラルネットワーク演算を行い、車両1の走行路のカント状態を判定するカント状態判定部を含む操舵ECU20とを備える。
(もっと読む)
段差学習システム
【課題】段差を検出中に現在位置の精度が低下した場合には、当該段差エリアの段差情報を記憶手段から削除することによって、正確な段差情報を学習することができ、段差に対して適切にサスペンション制御を行うことができるようにする。
【解決手段】道路の段差を検出する段差検出手段と、該段差検出手段が検出した段差に基づく段差エリアの段差情報を記憶する記憶手段と、車両の現在位置を検出する現在位置検出手段と、検出された現在位置の精度を算出する現在位置精度算出手段と、算出された現在位置の精度が所定のレベルより低いと、前記段差エリアの段差情報を前記記憶手段に記憶させない記憶処理手段とを有する。
(もっと読む)
車両用制御装置
【課題】 本発明は、先行車の走行路逸脱のおそれを考慮して自車に迫るリスクを回避する車両用制御装置の提供を目的とする。
【解決手段】 算出手段3によって算出された自車前方の先行車の速度や加速度と走行路情報取得手段4によって取得された自車前方のコーナー情報との対照によって、先行車逸脱確率算出手段6は、先行車がコーナーから逸脱する可能性を算出する。制御態様設定手段7は、その算出結果に応じて先行車の逸脱による影響を事前に対処可能なように自車の制御態様を設定する。通報手段8は、先行車の代わりに自車側がしかるべきところにその逸脱事故を通報する。
(もっと読む)
車両制御装置及び車両制御方法
【課題】 本発明は、巻き込み風発生時の車両の挙動を安定化させることができる車両制御装置の提供を目的とする。
【解決手段】 本発明による車両制御装置は、減衰圧の制御が可能なサスペンション、又は、ステアリング操作のアシスト量が制御可能なパワーステアリング装置を有する車両に適用される。車両制御装置は、自車と周辺車両との相対関係に基づいて、該周辺車両とのすれ違い時の空気流れの乱れに起因して発生する巻き込み風の規模を予測する巻き込み風量予測手段を備え、巻き込み風量予測手段による予測規模に基づいて、サスペンションの減衰特性、又は、ステアリング操作のアシスト量を変化させることを特徴とする。
(もっと読む)
21 - 27 / 27
[ Back to top ]