
Fターム[3D301AB18]の内容
Fターム[3D301AB18]に分類される特許
1 - 14 / 14
車両のロール角推定方法及び装置
【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を所望の精度で求めることが可能な方法及び装置の提供。
【解決手段】測定された第1及び第2の変位並びに第1及び第2の内圧値から、車両固有のロール剛性係数Kφ13を算出し、その後の任意の時点で測定された変位及び内圧値と上記算出したロール剛性係数Kφ13(Kφ13new)とに基づき、自動車高調整が行われなかった場合のロール角φ2esを求める。
(もっと読む)
減衰力制御方法及び減衰力制御システム

【課題】従来の「可変の減衰力を有する振動ダンパー」によれば、車両の通常の走行シーンにおいて、常時、エネルギを消費することになってしまうため、省エネルギの観点から、エネルギ消費量の削減が望まれる。
【解決手段】通電電流に応じて減衰力を変化させることができ、通電電流が0から増加するに従って減衰力を減少させる第1制御領域と、通電電流が、第1制御領域における通電電流の最大値よりも大きい場合、通電電流が増加するに従って減衰力を増加させる第2制御領域との2つの制御領域を有する減衰力可変ショックアブソーバ12と、通電電流の供給範囲を、第1制御領域或いは第2制御領域の何れかに選択するモード切替装置16とを有する。
(もっと読む)
車両のロール角推定方法及び装置
【課題】車高調整非実行時のロール角を推定することが可能な方法及び装置を提供する。
【解決手段】左右サスペンションの自動車高調整開始時の一定時間前から終了時の一定時間後までの任意の異なる2つの時点の各々において測定した各変位及び各内圧値から、それぞれ第1及び第2のロール角と該左右サスペンションによる第1及び第2のロールモーメントとを算出し、該ロール角及びロールモーメントから、該サスペンションを装着した車両固有のロール剛性係数を算出する。該サスペンションが示し得る内圧値をパラメータとして予め求めた複数個の変位特性の内、該左右サスペンションの測定内圧平均値に対応する変位特性を、該自動車高調整非実行時の該左右サスペンションに共通の変位特性として選択する。そして、該第2のロール角及びロールモーメント、該ロール剛性係数、及び該選択した変位特性に基づき該自動車高調整非実行時のロール角を求める。
(もっと読む)
作業車両の独立型サスペンション
【課題】作業車両のエンジンが始動した際に自動的に適切な車高に復帰することができる作業車両の独立型サスペンションを提供する。
【解決手段】サスペンションシリンダ94と、サスペンションシリンダ94に連通接続される第一油路100と、トランスミッションケース31と第一油路100とを連通接続する第二油路200と、作動油を第二油路200を介して第一油路100側へと圧送する油圧ポンプ201と、第二油路200内の作動油の流通可能な方向を切り換え、又は作動油の流通を遮断する流通方向切換手段203と、サスペンションシリンダロッド94bの伸縮量を検出するポジションセンサ401と、ポジションセンサ401による検出に係る情報に基づいて流通方向切換手段203を操作する自動モードを有する制御部450と、エンジン10が作動しているか否かを検出するエンジン作動検出手段402と、を具備した。
(もっと読む)
車高調整装置
【課題】 イグニッションオフ後において、確実に加速度センサなどの車両状態検出センサが検出する値に基づいて車高調整を行うか否かが判断できる車高調整装置を提供すること。
【解決手段】 車高制御用ECU60は、車両が停止し且つシフト位置が駐車位置となったときに前後加速度センサおよび横加速度センサが検出する検出値をブレーキ用ECU70と通信することにより取得し、メモリ60aに記憶する。そして、実際にイグニッションがオフとなったときにその記憶した値を基に車高調整の可否を判断する。よって、イグニッションオフ後にブレーキ用ECU70と通信する際の通信不良により加速度センサの検出値を取得することができなくなるような事態が起こることはない。このため車高調整の可否の判断時にその判断の基となる車両状態の検出値を確実に取得することができ、その検出値に基づいて確実に車高調整の可否を判断することができる。
(もっと読む)
減衰力可変ダンパの制御装置
【課題】 駐車時における電力消費を抑制しながら、ダンパの減衰力を高精度に温度補償すること可能とする減衰力可変ダンパの減衰力制御装置を提供する。
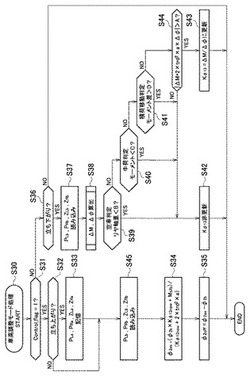
【解決手段】 ダンパ温度推定部54は、ステップS31で現時点における冷却水温Twと吸気温Taとの差を再始動時温度差Δtrとして算出した後、ステップS32で、不揮発性メモリーに記憶されていた第1停止時温度差Δt1と再始動時温度差Δtrとに基づき、停車時間推定マップから推定停車時間Tpを検索する。次に、ダンパ温度推定部54は、ステップS33で、第2停止時温度差Δt2と推定停車時間Tpとに基づき、温度差推定マップから推定温度差ΔTを検索する。しかる後、ダンパ温度推定部54は、ステップS34で現在の吸気温Taに推定温度差ΔTを加算することによってダンパ温度推定値Tdを求め、ステップS35でこのダンパ温度推定値Tdを目標電流生成部53に出力する。
(もっと読む)
車両用盗難防止装置
【課題】盗難防止用途以外で車両に搭載される高精度のセンサを盗難防止用センサとして利用する場合に、盗難の兆候を検出したときにのみ前記センサに電気を供給することで、イグニッションスイッチOFF時のバッテリの消費電流を低減する。
【解決手段】イグニッションスイッチを迂回してバッテリ60とセンサ22とを接続するための常開スイッチ33を有する揺れ検出センサ24が、車両の揺れを検出したとき常開スイッチ33を閉じて(図3B)センサ22にバッテリ60より電気を供給する。センサ22の出力により盗難判定部が盗難を判定する。
(もっと読む)
車載圧縮装置及びその制御方法
【課題】圧縮機の高い効率の運転と車室内の快適性とを両立することが可能な車載圧縮装置及び該車載圧縮装置の制御方法を提供する。
【解決手段】エンジン回転数が低い時、モータ(原動機)を停止あるいは低回転数で回転させてスクロール圧縮機(圧縮機)を停止あるいは低回転数で運転させ、エンジン回転数が上昇して高回転数域に到達した時点で、モータを高回転数で回転させてスクロール圧縮機を高回転で運転させる。したがって、エンジンの騒音が大きい状況にある時にだけ、モータを高回転数で回転させてスクロール圧縮機を高回転で運転させるので、スクロール圧縮機の騒音が目立たない。これにより、スクロール圧縮機の効率と車室内の静粛性との両方を確保することができる。
(もっと読む)
アーティキュレーション許容型サスペンションシステム
【課題】ローリングの抑制とアーティキュレーションの許容とが可能なサスペンションシステムにおいて、車体のジャッキアップの容易化を図る。
【解決手段】車高制御が行われておらず(S2)、車両が停止している状態(S4)において、ジャッキアップの開始前に手動操作されるべきジャッキアップスイッチがON操作された場合(S6)に、アーティキュレーション抑制状態とするバルブを閉じる(S12)。あるいは、4輪のいずれかに対応する車高の変化が、ドアが閉じている場合は小さい値(L1)に、開いている場合は大きい値(L2)に設定されるしきい値を越えた場合に、ジャッキアップが開始されたと判定し(S10)、アーティキュレーション抑制状態とするバルブを閉じる(S12)。一旦閉じたバルブは、ジャッキアップ終了が検出された場合(S13)に開いて、アーティキュレーション許容状態に戻す(S16)。
(もっと読む)
車両用サスペンション制御システム及び車両用サスペンション制御方法
【課題】ハイブリッド車両における縦置きエンジンによる車両のローリングを抑制することである。
【解決手段】駆動源の変更がない通常モードでは、センサの検出値がサスペンションの沈み特性にフィードバックされて振動が抑制される(S10)。縦置きエンジンの始動状態が取得されると、通常モードよりフィードバックゲインが高められる振動抑制モードとなり、より振動が抑制される(S12,S14,S16)。振動抑制モードは、エンジン回転数が立ち上がる所定の設定期間の間継続し、その後通常モードに戻される(S18)。エンジン停止においても同様にフィードバックゲインが高められて振動が抑制される(S22,S24,S26)。サスペンションスタビライザについてローリング方向を打ち消す方向に左車輪側と右車輪側の沈み特性を相互に逆位相とすることで振動を抑制することもできる。
(もっと読む)
サスペンション装置
【課題】 イグニッション操作時にセンサ信号にノイズが重畳してアクチュエータが予期しない動作をするといった不具合を防止する。
【解決手段】 車両ドア開閉によりイグニッションオン操作を事前に予測し(S20)、センサ類に通電するとともにセンサ出力に対して上限値リミッタを設ける(S21〜S22)。そして、実際のイグニッションオン操作を検出したのち、センサ出力リミッタを解除し(S25)、モータ駆動回路を短絡モードから駆動モードに切り替える(S26)。このとき、モータ駆動回路へのモータ制御指令値に対して所定時間だけ上限値リミッタを設ける(S27〜S29)。この結果、イグニッション操作時にセンサ出力信号にノイズが重畳してもシステムの安定作動が図られて、電磁アクチュエータ30の誤動作が防止される。
(もっと読む)
サスペンション装置
【課題】サスペンション装置において、給油作業中であることを、車高の変化に基づいて検出可能とする。
【解決手段】車両が停止状態にあり、かつ、人の乗降も荷物の積み降ろしも行われることがない場合に(S1〜5)、車高の変化速度が検出され(S6)、変化速度が設定範囲内にあり、かつ、周波数が設定周波数以下である場合には(S7,8の判定がともにYES)、給油作業中であるとされる(S9)。このように、車高の変化速度に基づくため、給油口開閉センサによらなくても、給油作業中であることを検出することができる。
(もっと読む)
車載機器制御システム
【課題】車両への乗り込み動作や荷物の積み込み動作などを従来よりも容易になし得ることが可能な車載機器制御システムを提供すること。
【解決手段】車両側ユニットから送信されるリクエスト信号に応答して、携帯機1がIDコードを含むレスポンス信号を返送する相互通信を行うことによって、車両側ユニットが、携帯機1からレスポンス信号を受信し、そのレスポンス信号に含まれるIDコードを予め登録してある登録コードと照合する。車両側ユニットは、そのIDコードの照合結果がOKとなったことに基づいて、車高制御装置9に車高低下信号を出力して、車両の車高を低下させる。これにより、携帯機1の保持者が、車両へ乗車する際、あるいは荷物の積み込みの際、車両10の車高が低下されるので、車両10への乗り込み動作や荷物の積み込み動作を従来よりも容易になし得ることができる。
(もっと読む)
パイロット型チェック弁およびこれを用いたサスペンション装置
【課題】 油圧車高調整機構を有するサスペンション装置におけるシステム停止される際に、油圧系統において油液の圧力変動(圧力脈動)が生じることを防止する。
【解決手段】 パイロット型チェック弁45のポペット61の背圧室88に、ばね86により付勢されたフリーピストン83を設ける。このフリーピストン83により、ポペット61が閉弁した瞬間の圧力変動を吸収する。
(もっと読む)
1 - 14 / 14
[ Back to top ]