
Fターム[3E003AA04]の内容
Fターム[3E003AA04]に分類される特許
1 - 4 / 4
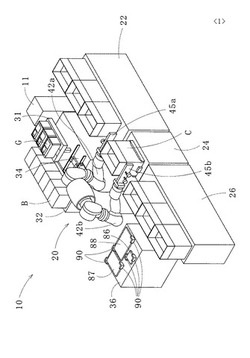
ロボット、加工システム、及び加工品の製造方法
【課題】作業を省人化することが可能なロボット、加工システム、及び加工品の製造方法を提供する。
【解決手段】加工システム10は、物品を供給する物品供給部31と、被加工物を搬送する第1の搬送部22と、第1の搬送部22の下流側に設けられ、第1の搬送部22によって搬送された被加工物が載せられる作業台24と、予め教示された作業動作に従って、作業台24の上に載せられた被加工物に物品を用いた作業を施すロボット20と、作業台24の下流側に設けられ、ロボット20により作業が施された被加工物を搬送する第2の搬送部26とを備える。
(もっと読む)
遊技盤の梱包ライン

【課題】緩衝材で囲繞した遊技盤を効率的に包装箱へ収納可能な遊技盤の梱包ラインを提供する。
【解決手段】上方が開口する包装箱11を収納待機位置P2に搬送する箱搬送コンベヤ12の上方に、遊技盤13を収納待機位置P2に臨む包装箱11の開口上方の箱収納位置P3に搬送する可動コンベヤ29が配設される。可動コンベヤ29は、搬送位置と下降位置および退避位置の間を移動し得る。箱収納位置P3に搬送した遊技盤13の下面を支持可能な支持部材36,36は、遊技盤下面の支持を解除する解除位置に移動し得る。可動コンベヤ29から支持部材36,36に受け渡された遊技盤13に緩衝材を配設した後、支持部材36,36を解除位置に移動すると共に可動コンベヤ29を退避位置に移動することで、収納待機位置P2に位置する包装箱11に遊技盤13を収納することができる。
(もっと読む)
添付文書挿入装置
【課題】 ガラス製などの容器の外周を損傷させないようにその周囲に緩衝部材をまきつけて箱詰めする装置において、その容器外周と緩衝部材の円弧状隙間に添付文書を配置する必要がある。その作業を所定時間内に自動的に行うことが求められていた。従来の装置では添付文書を挿入するときその幅の両端が衝突する場合があり自動システムとするのが困難であった。
【解決手段】 円弧状隙間に添付文書を挿入するとき、円弧状隙間に対応する断面形状のプッシャーと、その形状と略同じ形状の貫通溝を有する挿入ガイドとを備えた挿入機構であることを特徴とする。
(もっと読む)
自動首掛装着装置、ボトル箱詰装置及び首掛装着方法
【課題】 首付きのボトルを首掛付きの外装箱に詰める際に自動的に首掛をボトル首に掛けることができる自動首掛装着装置等を提供する。
【解決手段】 本発明に係る自動首掛装着装置20は、首掛折り機構31、首掛ガイド機構61、首掛押し込み機構81の三主要機構を備えている。首掛折り機構31の鉤部材33の円運動によって首掛2を折り曲げるときに、首掛ガイド機構61のガイド板63によって首掛2の首掛片4の首開口4aがボトル首10aに確実に合う。そして、ガイドされてボトル首10aの外側に嵌り込んだ首掛2が、首掛押し込み機構81の押し込み部材83によってボトル首10aの根元へと押し込まれる。このようにして、箱1の首掛2のボトル首10aへの装着を自動的に確実に行うことができる。
(もっと読む)
1 - 4 / 4
[ Back to top ]