
Fターム[3F029CA58]の内容
物品の積み重ね及び付属装置 (962) | 上からの積重ね手段 (263) | 把持装置 (86) | 旋回できるもの (24) | 水平軸 (8)
Fターム[3F029CA58]に分類される特許
1 - 8 / 8
物品保管設備及び物品保管設備における物品積付け方法
【課題】パレットとして、設定上限重量で物品を積み付けて収納部に収納した際の下方側の撓み量が、許容限度内となるパレットと、許容限度を超えるパレットとを使用しながらも、保管棚の収納効率の低下を抑制することができる物品保管設備を提供する。
【解決手段】物品BをパレットPに段積み状態に積み付ける積付け部Dが、難撓みパレットに物品を積み付けるときには、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて物品を積付け、かつ、易撓みパレットに物品を積み付けるときには、設定上限高さ以下でかつ設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品を積み付けるように構成されている。
(もっと読む)
物品保管設備及び物品保管設備における物品積付け方法

【課題】パレットとして、設定上限重量で物品を積み付けて収納部に収納した際の下方側の撓み量が、許容限度内となるパレットと、許容限度を超えるパレットとを使用しながらも、保管棚の収納効率の低下を抑制することができる物品保管設備を提供する。
【解決手段】制御手段が、撓み量が許容限度を超えるパレットを収納するときには、収納部Sのうちの空き状態の収納部のうちで、下方の収納部に物品が収納されていない収納部、又は、下方の収納部に物品が収納されている収納部であって、下方の収納部に収納されている物品Bの高さと収納対象のパレットの撓み量とに基づいて、収納対象のパレットを収納するときに、降ろし用目標高さの物品載置体8が下方の収納部に収納されている物品の上面から設定融通距離を離れることが予測される収納部を、収納対象の収納部として選択するように構成されている。
(もっと読む)
パレタイザ
【課題】順次供給される複数品種のワークを品種毎にパレタイズするパレタイザにおいて、簡単な構成により、複数のパレットのパレット交換のタイミングの重なりを時間を抑制し、効率的なパレタイズを実現する。
【解決手段】パレタイザ1は、ワークWを品種毎に仕分けして一時保管するバッファ部2と、バッファ部2からパレットPにワークWを移載するロボット3と、ロボット3を制御する制御部4とを備え、制御部4は、ロボット3による移載作業毎に、積載ワーク数Nと満杯ワーク数Mとから各パレットP毎に残ワーク数R=(M−N)を求め、残ワーク数Rと1回当たりのワークの移載に要する移載時間Δtとに基づいて各パレットP毎の積載完了までの残積載時間Tr=Δt×Rを求め、うち少なくとも1つのパレットPの残積載時間Trがパレット交換作業に要する既定のパレット交換時間Tよりも短くなることがないように移載作業を行うパレットPを選択する。
(もっと読む)
パレタイズ装置
【課題】パレタイズ装置において、簡単な構成により、ワークやパレットに寸法ばらつきがあっても、パレタイズ時のワーク間の干渉やパレタイズされたワーク間の隙間の発生を防止して柔軟に、且つ高速にパレタイズ可能とする。
【解決手段】本装置1は、ワークを把持するハンド部2と、ハンド部2を移動させるアーム部3と、積載したワークの位置情報を取得する計測部5と、前記情報を記憶する記憶部6と、各部の動作を制御する制御部10と、を備えている。制御部10は、ワークを把持したハンド部2を移動させてパレットにワークを積載した際に、計測部5によってそのワークの積載位置を取得して記憶部6に記憶させ、次のワークをパレットに積載する際に、記憶部6に記憶されている積載位置に基づいて、ワークの積載予定位置を決定する。既積載ワークの積載位置を基準にするので、ワークやパレットの寸法変動に対応でき干渉や隙間の発生を防止できる。
(もっと読む)
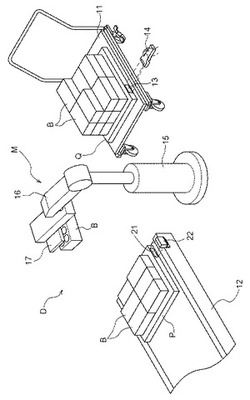
積付装置および積付方法
【課題】適切な積付作業ができる積付装置を提供する。
【解決手段】積付装置1は、回動部10を有する装置本体4を備える。回動部10にはベース体12を回動可能に設ける。ベース体12には、物品Wを両側方から挟持する固定挟持体23および可動挟持体31を設ける。ベース体12には、物品Wの下面を支持する下面支持体41を移動可能に設ける。積付作業時には、保持物品Wを積付物品Wの上方位置に平面視で保持物品Wが積付物品Wに対して傾斜した状態でかつ保持物品Wの一角部と積付物品Wの一角部とが平面視で一致した状態になるように位置させる。次いで保持物品Wの一部のみを積付物品W上に載せた後、平面視で保持物品Wの積付物品Wに対する傾斜をなくし、その後、下面支持体を移動させて保持物品を積付物品上に互いに嵌合した状態に積み付ける。
(もっと読む)
PTP段積み装置
【課題】ピロー包装の前工程でPTPを段積みするPTP段積み装置において、様々な段積み数に対応できるとともに、段取り替えの容易なものを提供する。
【解決手段】PTP段積み装置1は、PTP100を搬送する第1主コンベア11と第2主コンベア12、第2主コンベア12に並走する副コンベア13、第1主コンベア11、第2主コンベア12、及び副コンベア13の末端に一部が近接配置された段積み用コンベア14、第2主コンベア12上のPTP100を上下反転して副コンベア13に載置する反転移載装置20、及び、第1主コンベア11と第2主コンベア12の上に上下反転無しの状態で存在するPTP100と、副コンベア13上の上下反転有りのPTP100を所定の段積み順序で段積み用コンベア14の第1群のバケット15aまたは第2群のバケット15bに積み上げるロボット30を備える。
(もっと読む)
包装袋の自動集積装置
【課題】落下包装袋が集積装置内部で引っ掛かることなく正しい姿勢並びに正しい位置に乱れ無く段積みすることができる集積装置を提供する。
【解決手段】包装袋を左右交互に案内する振り分け機構と、振り分けられた包装袋を交互に受け止めて水平姿勢に導く回転羽根機構210、211と、水平姿勢になった包装袋を1乃至3個集積する第一のシャッター機構220、221と、予め設定された個数になるまで集積を行う第二のシャッター機構230、231と、ベルトコンベア240とから構成された集積装置において、この振り分け機構は、包装機から移送されてきた包装袋を左右交互に案内する振り分け部と、案内された包装袋をそれぞれ一旦保持する左右二つのポケット部とから成る。
(もっと読む)
トレイ段積み装置及びそれを用いた段積みトレイの移し替え方法
【課題】 複数段に段積みされているトレイの一部又は全部を、限られた箇所に荷重が集中するのを防止して、段積みの順序を維持したまま一括して段積み変更や移し替えを可能にするトレイ段積み装置及びそれを用いた段積みトレイの移し替え方法を提供する。
【解決手段】 トレイ段積み装置1は、ホルダユニット2,3の一側部において高さ方向に並べて配置された複数の爪部5を段積みされた複数のトレイ21と係合することで、複数のトレイ21が爪部5を介してホルダユニット2,3に保持される。この保持状態でホルダユニット2,3を上昇させると、複数の爪部5が、トレイ21の荷重を分散して支持する。ホルダユニット2,3の上昇によって持ち上げられた一続きのトレイ21は、適宜の手段で移動させるか、或いはホルダユニット2,3の下方に置かれた搬送手段を移動させ、その後、ホルダユニット2,3を下降し、トレイ21との係合を解除することで、段積み状態を維持しながら、一括した移し替えが可能となる。
(もっと読む)
1 - 8 / 8
[ Back to top ]