
Fターム[3F077EA13]の内容
船舶の荷積み、荷おろし (441) | 荷役装置の制御;検出、及び荷役方法 (101) | 吊荷の軌跡制御 (3)
Fターム[3F077EA13]に分類される特許
1 - 3 / 3
グラブバケット式アンローダのバラ物陸揚げ方法
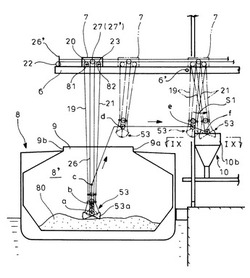
【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時は、横行方向前方の巻上げロープの巻き込みと横行方向後方の巻上げロープの繰り出しを同期させ、且つ横行方向後方の巻上げロープの繰り出しを遅らせることによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出すことによりグラブバケット53を前方へ振り出させるようにし、バラ物を掴んだグラブバケット53は、前方への振り出しと同時に開放を行ってバラ物をホッパ10内へ投入する。
(もっと読む)
ロープトロリ式アンローダのバケット位置決め方法

【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時には横行方向後方の巻上げロープを巻き込むことによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出してグラブバケット53をトロリ7が走行して来た方向の前方へ振り出させて槽8'内へ着地させることにより、槽口9直下よりも前後外側奥部のバラ物80を陸揚げ可能にした。
(もっと読む)
荷役用クレーンの制御装置
【課題】コンテナ等の荷役作業における巻上げ量とスプレッダ等の支持手段の方向とを適切に制御することにより、荷役効率を大幅に向上させることができる荷役用クレーンの制御装置を得る。
【解決手段】船に設置された複数の船体用GPSアンテナ22a及び22bと、船と陸との間で荷物を積み降ろすクレーン5に設けられたクレーン用GPSアンテナ14と、クレーン5に設けられ、荷物を所定の方向から支持する支持手段と、船体用GPSアンテナ及びクレーン用GPSアンテナ14により検出された各位置データに基づいて、荷物の横行時の障害物高さ及び横行される荷物の下面高さを演算し、複数の船体用GPSアンテナ22a及び22bにより検出された各位置データに基づいて、荷物の傾斜を演算する演算手段21とを備え、演算手段21の演算結果に基づいて、クレーン5の巻上げ量及び支持手段の傾斜を制御する。
(もっと読む)
1 - 3 / 3
[ Back to top ]