
Fターム[3F204FB04]の内容
クレーンの細部(制御、安全) (2,955) | 異常状態発生箇所;作動制限条件 (156) | 巻上装置;昇降装置 (23) | ワイヤロープ (6)
Fターム[3F204FB04]に分類される特許
1 - 6 / 6
クレーンの制御方法及びその制御装置
【課題】
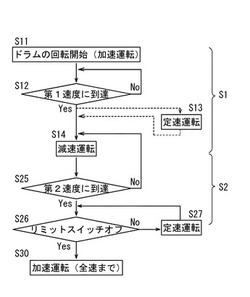
クレーンによるコンテナの荷役の際に、主巻ワイヤロープにコンテナの荷重がかかる瞬間に発生するロープの跳ね上げを抑制し、機械室等への損傷を低減し、かつ、荷役速度が上昇するクレーンの制御方法及びその制御装置を提供する。
【解決手段】
主巻ワイヤロープ10を、スプレッダ7に設置した速度制限手段13の作用により制限されている制限速度で巻き取り、コンテナ4を荷揚げするクレーン1の制御方法において、コンテナ4の荷揚げ作業が、主巻ワイヤロープ10のたるみを、制限速度V0より速い第1速度V1で巻き取るたるみ取り工程と、主巻ワイヤロープ10を制限速度V0より遅い第2速度V2で巻き取るロープ緊張工程を有する。
(もっと読む)
建設機械用メンテナンス情報管理装置及び建設機械用メンテナンス情報管理方法

【課題】建設機械の消耗品のメンテナンス時期を的確に把握できるようにする。
【解決手段】特定の作業の作業時に検出された前記消耗品の負荷を代表させる代表値を累積して記憶する記憶手段56と、記憶手段56に累積して記憶された負荷代表値に基づいて、当該消耗品のメンテナンス時期に関する情報を導出する導出手段59が含まれている。記憶手段56は、吊り作業又はブーム起伏作業によって負荷のかかる油圧ホース類の負荷代表値として、当該作業の作業半径と吊り荷重との積であるモーメントと作業時間とに基づくモーメント時間を累積して記憶する。
(もっと読む)
ワイヤロープ寿命管理装置および方法
【目的】ショック荷重によってワイヤロープが受ける損傷を考慮して,ワイヤロープの寿命を算出する。
【構成】ワイヤロープがドラムから繰出され,かつ上記ドラムに巻戻されることによって,上記ワイヤロープおよび上記ワイヤロープが掛けられたシーブを介して荷物がつり上げられ,かつ降ろされる。シーブに設けられたロードセルから出力される荷物の荷重データに基づいて,上記荷物の実荷重および上記実荷重を所定量以上超えるショック荷重の有無が検知される(ステップ33)。ショック荷重の存在が検知された場合に,ショック荷重の存在が検知されなかった場合の寿命減算値に1以上の値を持つ補正係数が乗算して得られた値が推定寿命から減算され(ステップ34),新たなワイヤロープの推定寿命(残り使用可能回数)が表示される(ステップ35)。
(もっと読む)
ワイヤーロープ監視装置およびワイヤーロープ監視方法
【課題】ワイヤーロープの点検作業が容易に行えるワイヤーロープ監視装置およびワイヤーロープ監視方法を提供する。
【解決手段】誘導電動機を制御する主制御部は、上部滑車の回転量に応じて所定のパルスを発生するパルス発生器と、誘導電動機の電流値からフックに取付けられた荷重を計測する荷重変換部を備え、主制御部は、ワイヤーロープを下部滑車の円周の長さの半分またはそれ以下の所定長さ毎に区分された複数の単位長ワイヤーロープのそれぞれに位置情報を設定し、位置情報に対応して上部滑車と下部滑車とが複数の単位長ワイヤーロープの各々と接触する回数をパルス発生器で発生するパルスの数と関連付けて計数すると共に、荷重変換部から得られる下部滑車の前記フックに吊下げられる荷重を計測することによりワイヤーロープの寿命を監視する。
(もっと読む)
移動式クレーンの過巻防止装置
【課題】フックの過巻を防止しつつ、作業効率の向上及び信頼性の向上を図り得る移動式クレーンの過巻防止装置を提供する。
【解決手段】移動式クレーンの作業アタッチメントの先端部から複数のフックが各々ワイヤロープにより支持して吊り下げられているとともに、各フックを各々ワイヤロープを介して巻き上げ又は巻き下げる複数のドラムが上部旋回体に設けられている。過巻防止装置20は、各フックの過巻状態を各々検出する複数の過巻検出手段21b,22bと、複数のフックと各々実際にワイヤロープを介して接続された複数のドラムとの対応関係を検知する検知手段と、各過巻検出手段の信号を受け、1つのフックが過巻状態になったとき、検知手段の検知に基づいて、過巻状態のフックと接続された1つのドラムの回転を停止し、他のドラムの回転を継続するように制御する制御手段33とを備える。
(もっと読む)
クレーン装置
【課題】 任意の方向に搬送物を搬送できるようにし、しかも、索体の振れの検知に応じて任意の方向に搬送できるようにするとともに、索体の振れに対するモータの駆動の応答性を良好にし、応答性の補償を確実に得る。
【解決手段】 第1モータ12により第1レールを走行する一対の第1走行体と、第2モータ22により一対の第1走行体に懸架される第2レールを走行する第2走行体と、第2走行体に吊下され搬送物を懸吊する索体30と、索体30の振れを検知する検知部40と、第1及び第2モータ12,22を駆動制御する駆動制御手段60とを備え、検知部40を、索体30の周囲に配設され索体30が近接したことを検知する3以上の近接検知センサ41a〜41dを備えて構成し、駆動制御手段60を、各近接検知センサ41a〜41dの検知の有無に基づいて第1及び第2モータ12,22の回転方向を判断させて各モータ12,22を駆動させるようにした。
(もっと読む)
1 - 6 / 6
[ Back to top ]