
Fターム[3F205DA16]の内容
ジブクレーン(門形、ケーブルクレーン) (4,302) | 俯仰、引込機構 (375) | 吊荷の軌跡制御 (10)
Fターム[3F205DA16]の下位に属するFターム
Fターム[3F205DA16]に分類される特許
1 - 3 / 3
クレーンの制御装置
【課題】負荷検出器の誤差の影響を受けにくく、より確実に荷振れを抑制できるクレーンの制御装置を提供する。
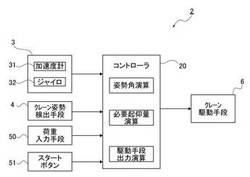
【解決手段】起伏自在のブームと、前記ブームの先端からワイヤによって吊り下げられるフックと、を備えるクレーンの制御装置2である。
そして、このクレーンの制御装置2は、吊荷を地切りする際に、ワイヤを巻上げてブームの撓みを増加させ、撓みの増加に基づくブーム先端の位置ずれを打ち消すためのブームの必要起仰量をブーム先端の姿勢のみに基づいて演算し、必要起仰量だけブームを起仰する移動制御手段20を備える。
(もっと読む)
クレーンの操作装置及びクレーン

【課題】簡単に操作モードを切換えることができるクレーンの操作装置を提供する。
【解決手段】作業機を駆動させる複数の駆動手段31,32,33,34を有するクレーン1に装備されて、操作量に応じて駆動手段31,32,33,34を動作させる操作手段2を備えるクレーンの操作装置Sである。
そして、操作手段2が操作されると、第1の駆動手段33又は第2の駆動手段31のいずれか一方に操作量に応じた速度で単独操作をさせた後に一定速度で単独動作をさせつつ、第1の駆動手段33又は第2の駆動手段31のいずれか他方に操作量に応じた速度で単独動作をさせる連動操作を行う連動操作制御手段50を備えている。
(もっと読む)
運動補償システム
ヒーブ補償システムまたは運動補償システム(100)が、クレーン(20)において使用され、該クレーンを搭載する船(22)が直面するヒーブを補償する。ヒーブ補償システムは、クレーンのアーム(36)の遠位端部分に取り付けられた、クレーンのアームの遠位端部分の運動(加速度)を測定する運動参照ユニット(102)を備えている。この情報が、クレーンによって保持されたウインチ(50)の動作を制御して、クレーンの荷重線(32)の繰り出しまたは巻き取りを行うために、プログラマブルロジック制御プロセッサ(104)へと送られる。荷重線の遠位端を、クレーンによって昇降させられる負荷へと接続することができる。 (もっと読む)
1 - 3 / 3
[ Back to top ]