
Fターム[3F333FE10]の内容
フォークリフトと高所作業車 (11,384) | 制御機器 (803) | その他 (12)
Fターム[3F333FE10]に分類される特許
1 - 12 / 12
産業車両用データ通信システムの動作切替装置及びモード切替装置
【課題】
産業車両の走行系および作業系の積算処理を行う機器が分散していたとしても、各機器に一括して積算処理及び積算処理の中断を指示できるようにし、積算処理と積算処理の中断との切替作業を簡易にすることによって作業時間を短縮する。
【解決手段】
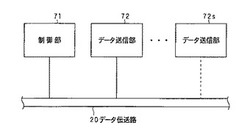
制御部71はデータ伝送路20を介して特定のデータ送信部72sから送信される信号を受信しなければ、データ送信部72から送信されるデータを使用する第1の動作態様で動作する。特定のデータ送信部72sがデータ伝送路20に接続されると、特定のデータ送信部72sはデータ伝送路20に自己が接続されていることを示す信号(例えば起動信号)を送信する。制御部71はデータ伝送路20を介してこの信号(例えば起動信号)を受信すると、特定のデータ送信部72sから送信されるデータを使用する第2の動作態様に切り替わる。
(もっと読む)
高所作業車使用可否支援装置

【課題】 配電線作業を行う際に高所作業車を使用できるか否かの判断を支援する。
【解決手段】 電柱を識別する電柱番号に関連付けて、電柱の設置位置やその周辺の地図情報などの電柱情報を記憶する電柱データベース4と、入力された電柱番号と高所作業車の大きさやブームの種類などの車両情報と、電柱データベース4の電柱情報とに基づいて、入力された電柱番号の電柱の周辺に高所作業車を駐車した状態で、高所作業車のブームによって電柱の作業が可能か否かを判断する支援プログラム5と、を備える。
(もっと読む)
車両用操舵装置
【課題】省エネルギに寄与することができ、耐久性に優れた車両用操舵装置を提供する。
【解決手段】停車中(車速=0)あるいは微速走行のときに大きな操舵角θH(|θH|≧θH0)の操舵がなされた場合、目標転舵角θW*を、制限を受けていない通常マップ(破線で示す)上の通常値θWA*(または−θWA*)と零との間の所定の制限値θW0*(または−θW0*)に制限する。
【効果】次に停車時から発進するとき、または微速から走行速度を増加させるときに、実際の転舵角θWの絶対値が過度に大きい状態で走行するようなことがないので、走行抵抗を低減できる。
(もっと読む)
多段マスト式フォークリフトの荷重計測装置
【課題】マスト装置のリフトシリンダが複数段であるフォークリフトにおいて、正しい荷重の計測を常に行うことが可能であり、さらに高い実用性を実現した多段マスト式フォークリフトの荷重計測装置を提供する。
【解決手段】荷重計測装置のマスト装置はいわゆるフルフリーマスト装置である。記憶部には、第2リフトシリンダに荷重が作用していないときの高揚高0点電圧を除き、各段に関するパラメータが予め記憶されている。また、荷重計測装置は、第1リフトシリンダに荷重が作用していないときの低揚高0点電圧と、このときの圧力センサの出力電圧とに基づき、高揚高0点電圧V0high(V)を算出するステップS37を有している。
(もっと読む)
作業車両
【課題】放電と充電とを制御でき、かつ開発の手間を大幅に省くことができる電源コントローラを搭載した作業車両を提供すること。
【解決手段】電源コントローラ33は、系統電圧ライン62と、第1、第2バッテリモジュール43,44を直列の関係で系統電圧ライン62に接続するか、または並列の関係で接続するかを切り替える電源回路74と、充電を行う場合には、その接続関係が並列となるように電源回路74を制御し、放電を行う場合には、第1、第2バッテリモジュール43,44の合計電圧に応じた切替周期で電源回路74での切り替えを制御する制御部77とを備、電源コントローラとして、電源回路の数の異なるものが複数種類用意されており、その中から力電圧および容量に応じた数の電源回路74〜76を有した電源コントローラ33が選択されて用いられている。
(もっと読む)
フォークリフト
【課題】キャパシタを備え、回生エネルギーを効率良く利用することができるフォークリフトを提供する。
【解決手段】バッテリフォークリフトは、リフトシリンダを駆動するとともにフォークの下降移動時に回生エネルギーを発生する荷役用モータ28と、バッテリ23にスイッチ25aを介して並列に接続されたキャパシタ24と、キャパシタ24の電圧を検出する電圧センサ33とを備えている。回生エネルギーをキャパシタ24のみに充電可能な状態又はバッテリ23にも充電可能な状態に切り換え可能なスイッチ25a,25bを制御する制御装置30は、回生エネルギーをキャパシタ24に充電できるようにキャパシタ24のエネルギーを調整する。したがって回生エネルギーがキャパシタ24により多く充電されるので充電時の電力効率が高くなり、回生エネルギーを効率よく利用できる。
(もっと読む)
産業車両用データ通信システムの動作切替装置及びモード切替装置
【課題】
産業車両の走行系および作業系の積算処理を行う機器が分散していたとしても、各機器に一括して積算処理及び積算処理の中断を指示できるようにし、積算処理と積算処理の中断との切替作業を簡易にすることによって作業時間を短縮する。
【解決手段】
制御部71はデータ伝送路20を介して特定のデータ送信部72sから送信される信号を受信しなければ、データ送信部72から送信されるデータを使用する第1の動作態様で動作する。特定のデータ送信部72sがデータ伝送路20に接続されると、特定のデータ送信部72sはデータ伝送路20に自己が接続されていることを示す信号(例えば起動信号)を送信する。制御部71はデータ伝送路20を介してこの信号(例えば起動信号)を受信すると、特定のデータ送信部72sから送信されるデータを使用する第2の動作態様に切り替わる。
(もっと読む)
フォークリフトの作業補助システム
【課題】荷置き又は荷取りを行う作業範囲全体を確認することで、効率よく且つ安全に作業を行うことができ、しかも人件費の低減が図れる。
【解決手段】コンベア4に設けられているIDタグ5と、フォークリフト2に設けられているリーダ6と、コンベア4の荷置き位置Tを上方から撮影する作業監視カメラ7と、フォークリフト2の運転室2aに設けられた車載モニター8とを備えている。IDタグ5とリーダ6とが交信状態であるときに、IDタグ5に対応した作業監視カメラ7を起動させ、IDタグ5の識別情報をリーダ6で読み取って車載モニター8を起動させると共に、交信したIDタグ5に対応する作業監視カメラ7を特定して作業監視カメラ7の映像を受信し、車載モニター8に映像を映し出すようにした。
(もっと読む)
荷崩れ防止装置
【課題】荷崩れや荷擦れが発生する原因となる荷役機械の振動や衝撃を検知して警報を発したり、荷役機械の速度制御を行うことにより、荷崩れや荷擦れを防止することができる荷崩れ防止装置を提供する。
【解決手段】荷崩れ防止装置は、荷役機械の振動や衝撃を検知するための加速度センサ11と、該加速度センサ11が検知した加速度値をあらかじめ設定された閾値と比較する処理装置12と、該処理装置12で前記加速度値が前記閾値を超えたときに警報を発生する警報発生手段13又は荷役機械の速度を制御する速度制御手段とを備えている。
(もっと読む)
作業車の遠隔操作装置
【課題】制御対象部位の到達目標絶対座標位置の入力を簡単且つ容易に行うことのできる作業機の遠隔操作装置を提供する。
【解決手段】携帯操作部6に、操作部絶対座標位置を検出する操作部絶対座標位置検出手段11を取り付けると共に、携帯操作部6の目標位置指示手段7を、携帯操作部6を到達目標位置方向に指向させることで操作部絶対座標位置を基点とする到達目標位置の方位を指示する方位指示手段12と、携帯操作部6の現在位置から到達目標位置までの離隔距離を指示する距離指示手段13とで構成し、到達目標絶対座標位置を、操作部絶対座標位置、方位指示手段12からの方位、および、距離指示手段13からの離隔距離から算出して求めるようにした。
(もっと読む)
高所作業車
【課題】高所作業車の地絡が検出されていない場合に、ブームの作動を規制することにより、安全性をさらに向上させた高所作業車を提供する。
【解決手段】高所作業車1は、走行移動可能な車両本体10と、車両本体10に対し起伏及び旋回自在に取り付けられた作業台ブーム起伏操作装置43及び作業台ブーム旋回操作装置44と、操作装置43,44の作動を規制するインターロック制御部72と、車両本体10に備えられ、地面Gに接地することにより車両本体10を支持する4つのジャッキ50と、それぞれが各ジャッキ50の接地を検出し、接地信号を出力する複数の接地検出装置55と、車両本体10を地絡するための接地棒80と、車両本体10の地絡を検出し、地絡信号を出力する地絡検出装置85と、を備える。インターロック制御部72は、接地信号及び地絡信号に基づいて、操作装置43,44の作動を規制する。
(もっと読む)
電気制御ユニットを備えた構内運搬車両
【課題】構内運搬車両の走行機能および/またはリフト機能のための少なくとも1つの電子制御装置と、物品識別手段とのデータ伝送のための少なくとも1つの通信装置たとえばRFIDトランスポンダを備えた構内運搬車両において、簡単な操作、高度な安全性ならびにエネルギー蓄積との効率的な関係を実現する。
【解決手段】通信装置15と構内搬送車両の走行機能および/またはリフト機能のための電子制御装置3との間にデータ伝送のための手段14が設けられている。
(もっと読む)
1 - 12 / 12
[ Back to top ]