
Fターム[3H086DB01]の内容
供給装置、増圧器、変換器、テレモータ (2,252) | 構造 (38) | 出力が変位のもの (3)
Fターム[3H086DB01]に分類される特許
1 - 3 / 3
アクチュエータ
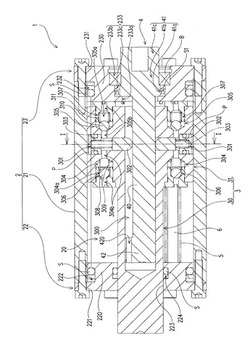
【課題】油圧シリンダと同等の性能を発揮しつつも小型化及び軽量化することのできるアクチュエータを提供する。
【解決手段】シリンダ部21の作動油が充填されたボア20を閉塞する閉塞部23に挿通された回転軸4を備え、ピストン部31は、軸挿入穴300に向けて開放したプランジャ内装穴301が周方向に間隔をあけて複数穿設されて各プランジャ内装穴301にプランジャ302及びプランジャ付勢手段303が内装され、且つ、一端側で開口してプランジャ内装穴301に連通する第一流路304、及び、他端側で開口してプランジャ内装穴301に連通する第二流路305がプランジャ302に対応して複数設けられ、第一流路304及び第二流路305のそれぞれに逆止弁が内装され、回転軸4は軸挿入穴300に挿入されて回転中心に対してずれた位置に軸心がある偏心軸部40を備えている。
(もっと読む)
方向制御される油交換による位置修正を有する受動液圧制御装置
本発明は、その都度、シリンダ(1)の1つにおけるピストンの移動が他のシリンダ(1)の少なくとも1つにおけるピストンの移動という結果(順次制御)をもたらすように、2つ以上の液圧シリンダ(1)のピストンの両側における容積V1およびV2が互いに液圧的に接続されている受動液圧制御装置に関する。この種の受動液圧制御装置の全てのシリンダ(1)のピストン行程の総和Δs=k1s1+k2s2+…+knsnが理想的には常にΔs=0=一定であり、比例定数k1,k2,…knがシリンダ(1)のピストン面積の逆数であり、それらの符号が液圧シリンダ(1)間の接続管が交差しているか否かに依存する。この種の受動液圧制御装置はいつまでも位置安定ではなく(Δs≠0≠一定)、特に静的な基本負荷のもとにある変化する位置誤差Δsが考慮されなければならない。この位置誤差は、本発明にしたがって、次によって修正される。すなわち、位置誤差Δsが定義されるべき正の位置誤差限界+Δsを上回るとき、もしくは負の位置誤差限界−Δsを下回るときにその都度、容積V1およびV2間の接続が両容積間の液圧用液体の交換のために形成されること、この接続が液圧用液体の交換を常に位置誤差Δsの符号に依存して定められた一方向においてのみ許容すること、この接続が、少なくとも、定義された位置誤差限界の1つ+Δsもしくは−Δsが上回られるかもしくは下回られるだけでなく、更にピストン行程s1…snとそれぞれに付属の比例定数k1…knとの全ての積も位置誤差Δsと同じ符号を有する場合に形成されていること、そしてこの接続を介する液圧用液体の交換が液圧シリンダ(1)のピストン棒への力作用によって行なわれることである。 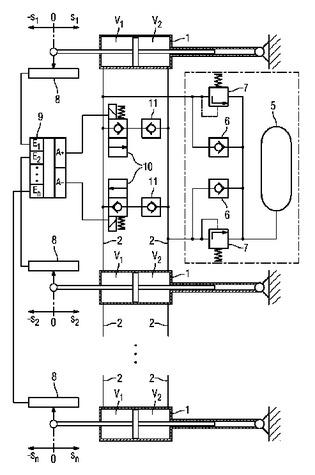 (もっと読む)
(もっと読む)
アクチュエータ

【課題】
空気圧等の流体圧の入力圧に応じてそれに応じた超微細ストロークを発生するアクチュエータを提供する。
【解決手段】
複数の切込み21〜24を備えるボディ10に対して交差するように中心部に挿通孔12を形成するとともに、ボディ10の端部に凹部13を形成し、凹部13内に収納保持される圧力板16に連設されるロッド17を上記挿通孔12内に配し、ダイヤフラム19を介して上記圧力板16に入力圧力を印加したときに、切込み21〜24の根元側の連結部の弾性変形によって出力点Pがストロークを生ずるようにする。
(もっと読む)
1 - 3 / 3
[ Back to top ]