
Fターム[3J102GA08]の内容
その他の軸受(磁気軸受、静圧軸受等) (9,013) | 用途 (815) | ターボチャージャ用 (14)
Fターム[3J102GA08]に分類される特許
1 - 14 / 14
熱処理なしに腐食環境での使用のためのジャケット付き電磁気機械ステーター
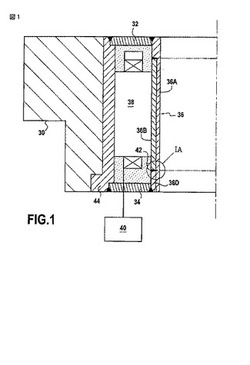
【課題】H2SまたはウェットCO2を包含している腐食環境中で動作するに適したステータを提案する。
【解決手段】エアギャップによってローターから分離された複数の磁極片38を有している加圧回転機械のためのジャケット付き電磁機械ステーターは、前記ステーターを前記腐食環境から保護するハーメチックシールエンクロージャーが、前記磁極片に合って配置された前記腐食環境に接触しない磁性体象眼36Bを有している非磁性シリンダー36Aによって構成されたジャケットを有しており、前記ハーメチックシールエンクロージャーは、どんな熱処理にもさらされなかった溶接部によって互いに固定される非磁性体36Aで作られたパーツによって構成されている。
(もっと読む)
スラストフォイル軸受

【課題】スラストフォイル軸受の負荷容量を高める。
【解決手段】回転部材(フランジ部40)及び固定部材(スラスト部材21)にそれぞれ磁石23、24を取り付け、磁石23、24間に生じるスラスト方向の斥力により、回転部材と固定部材とのスラスト方向に支持力を補助する。
(もっと読む)
ターボ機械
【課題】
機能性を損なうことなくターボ機械の製造費用を削減する。
【解決手段】
機械ハウジング(1)と、少なくとも1つのインペラ(3)を支持するロータシャフト(2)と、少なくとも1つの能動型磁気軸受(5A,5B)を備える軸受装置と、少なくとも1つのギャップセンサ(6A,6B)と、このギャップセンサ(6A,6B)に接続された、能動型磁気軸受(5A,5B)を制御するための制御機器(8)とを有するターボ機械であって、ギャップセンサ(6A,6B)によって位置決定をするために、ロータシャフト(2)に、ギャップセンサ(6A,6B)と協働するターゲット面(7A,7B)が配設されている形式のものにおいて、ターゲット面(7A,7B)として、ロータシャフト(2)のベース材料上に形成された銅層を設ける。
(もっと読む)
流体膜軸受の不安定性制御方法
【課題】流体膜軸受と組み合わせた磁気軸受を用いて流体膜軸受の不安定性を制御する方法の提供。
【解決手段】流体膜軸受18が主耐荷軸受として作用し、磁気軸受アッセンブリ12がこの流体膜軸受の不安定性を制御する。この効果的な組み合わせによって、安定性の問題も信頼性の問題もなく高速で使用できる軸受が提供される。流体膜軸受の不安定性を制御する代替の方法は、軸方向におけるフローを妨害することである。例えば、スリーブ(ジャーナル)軸受は、軸受軸をシャフト軸に対して傾けて製造することができ、あるいは、可変ジオメトリの軸受は、軸受の角度ミスアラインメントを作るように製造することができる。
(もっと読む)
縦型バランス計測装置
【課題】外乱が作用して、スラスト空気軸受の釣り合い位置から回転軸が上下動した場合でも、回転軸の自励振動を抑制して短時間に釣り合い位置に戻すことができる縦型バランス計測装置を提供する。
【解決手段】シール円板1bの下面に向けてスラスト支持用の加圧空気を供給するスラスト給気孔11aを有する軸受マウント10と、スラスト給気孔11aに加圧空気を供給する加圧空気源12と、スラスト給気孔11aと加圧空気源12との間に設けられた空気たまり14とを備える。
(もっと読む)
磁気軸受制御装置と方法
【課題】前回り成分と後回り成分の両方を安定化することができ、複数の周波数帯域の減衰を増加させることが可能な磁気軸受制御装置と方法を提供する。
【解決手段】ロータの変位X,Yに基づきロータを中立位置に保持するフィードバック制御器32と、ターゲット周波数Nfが含まれる予め設定した前回りターゲット周波数帯域に一致するロータの前回り変位信号のみを抽出するFクロス制御フィルタ36A,36Bと、ターゲット周波数Nbが含まれる予め設定した後回りターゲット周波数帯域に一致するロータの後回り変位信号のみを抽出するBクロス制御フィルタ37と、抽出したx軸の入力信号に所定のゲインkをかけてy軸用電磁石の電流指令信号Iyに重畳させ、抽出したy軸の入力信号に所定のゲインkをかけてx軸用電磁石の電流指令信号Ixに重畳させるクロス回路38A〜38Cとを備える。
(もっと読む)
磁気軸受制御装置と方法
【課題】ロータの回転周波数と異なる外力が作用する場合でも、その外力の周波数を危険速度を通過させることができ、回転同期成分以外の周波数帯域の位相を進めることができ、回転体の加減速が早い場合でもトラッキングが外れることがなく、回転同期成分を抽出するPLL(フェーズロックドループ)が不要である磁気軸受制御装置と方法を提供する。
【解決手段】ロータ11の変位x,yに基づきロータを中立位置に保持するフィードバック制御器22と、予め設定した周波数範囲(ωf±Δω)のロータの変位信号x,y又はフィードバック制御器の電流指令信号Ix,Iyのみを抽出する広帯域フィルタ24と、抽出したx軸の入力信号に所定のゲインkをかけてy軸用電磁石12yの電流指令信号Iyに重畳させ、抽出したy軸の入力信号に所定のゲインkをかけてx軸用電磁石12xの電流指令信号Ixに重畳させるクロス回路28とを備える。
(もっと読む)
磁気軸受制御装置と方法
【課題】ロータの回転周波数と異なる外力が作用する場合でも、その外力の周波数を危険速度を通過させることができる磁気軸受制御装置と方法を提供する。
【解決手段】ロータ11の変位x,yに基づきロータを中立位置に保持するフィードバック制御器22と、ロータの回転周波数に同期する同期周波数ωNに基づきこれに一致する不釣合い力を相殺する同期フィードフォワード制御器24と、ロータの回転周波数に同期しない回転非同期周波数ωFに基づきこれに一致する不釣合い力を相殺する1又は複数の回転非同期フィードフォワード制御器26とを備える。
(もっと読む)
軸受装置および燃料電池用圧縮機
【課題】低速回転時に、動圧軸受19において摩耗が生じたり回転軸10が偏心したりしない上、高速回転時には、前記動圧軸受19によって、回転軸10を非接触の状態で支持できる軸受装置17と、それを用いた燃料電池用圧縮機を提供する。
【解決手段】軸受装置17は、回転軸10を支持する転がり軸受18の内輪28を、軌道面27を有し回転軸10との間に隙間を設けた第1内輪30と、前記隙間に挿入されて第1内輪30に内接する第2内輪31の2ピースに形成し、前記第2内輪31を、スライド調整部41によって、低速回転時には前記内接した状態、高速回転時には隙間から引き出して内接を解除した状態となるように軸方向にスライドさせる。燃料電池用圧縮機は電動モータの回転軸を前記軸受装置17によって支持する。
(もっと読む)
磁気軸受装置
【課題】渦電流低減効果を維持したまま、磁気軸受装置の製作を容易にし、製作の精度を向上させることを可能にする磁気軸受装置を提供する。
【解決手段】回転軸3を磁力で支持する磁気軸受装置10であって、回転軸3の周方向に配置された複数の磁極5を備え、各磁極5は回転軸外表面に近接して対向する内端面5bを有する。周方向に隣接する磁極同士は、それぞれ、当該磁極5の内端面5bまで当該磁極5の軸方向に延び、これにより回転軸外表面近傍で互いに干渉し得るようになっており、干渉し得る両磁極5の干渉部5aが、カットされている。
(もっと読む)
電磁軸受を利用するターボ機械内にてシールを位置決めする方法
電磁軸受を利用するターボ機械内にて軸及び関係したシールを位置決めする方法である。該方法は、電磁軸受の巻線に電力を印加して、軸の中心が第一の位置にあり、軸は、関係したシールと接触している。電磁軸受に対する電力を調節することにより、ターボ機械の通常の作動中に、軸がその中心合わせした位置にて回転するとき、シールが軸と非接触状態となる位置まで減少する振幅の一連の動きにて軸を動かすことにより、シールは、軸により操作することができる。軸の軸線が電磁軸受の軸線と実質的に同軸状となるとき、通常の作動中に、軸はその中心決めした位置にある。減少する振幅の一連の動きは、1つの以上の軸線の回りにて減少する振幅の揺動を含むことができ、又は軸を当初の位置すら最終位置まで動きさせる減少する振幅の半径を有するスパイラル状の回転を含むことができる。軸の動きは、電磁軸受の巻線に対する電力を調節することにより、実現される。 (もっと読む)
燃料電池用過給機
【課題】 高速回転での使用に有利でしかも耐久性に優れている燃料電池用過給機を提供する。
【解決手段】 燃料電池用過給機6は、ケーシング11内に設けられた遠心圧縮機12と、圧縮機12の回転軸13を支持する軸受装置14とを備えている。軸受装置14は、回転軸13に同心状に設けられて回転軸13を径方向から支持する1対のラジアルフォイル軸受21,22と、回転軸13に軸方向から対向させられて回転軸13を軸方向から支持する1組のアキシアル磁気軸受23とを備えている。アキシアル磁気軸受23の各アキシアル電磁石24,25がラジアルフォイル軸受21,22に一体化されている。
(もっと読む)
磁気軸受装置
【課題】 圧力検出センサで検出できるスラスト力以外の軸方向外乱力を補償して、電磁石による支承力を制御できる転がり軸受を併用した磁気軸受装置を提供する。
【解決手段】 磁気軸受17を構成する電磁石17A,17Bは、主軸13に垂直かつ同軸に設けられた強磁性体からなるフランジ状のスラスト板13aに非接触で対向するように、スピンドルハウジング14に取付けられる。一方の電磁石17Aのヨーク17a内には永久磁石20が配置され、アキシアル方向の力を検出するセンサとしての圧力検出センサ61〜64と電磁石17Aの磁極表面またはヨーク17a内の磁束密度を測定する磁束密度検出センサ18の出力に応じて、電磁石17A,17Bを制御するコントローラ19を有し、転がり軸受15,16と転がり軸受の支持系とで形成される合成バネの剛性値が、電磁石17A,17Bの負の剛性値よりも大である関係を有するように設定される。
(もっと読む)
磁気軸受装置
【課題】 転がり軸受と磁気軸受を併用した磁気軸受装置において、最大荷重が作用した場合でも、安定な制御が可能でコントローラの構成も簡略化でき、電磁石での発熱も小さく抑えることができるものを提供する。
【解決手段】 磁気軸受17を構成する電磁石17A,17Bは、主軸13に垂直かつ同軸に設けられた強磁性体からなるフランジ状のスラスト板13aに非接触で対向するように、スピンドルハウジング14に取付けられる。一方の電磁石17Aのヨーク17a内には永久磁石20が配置される。転がり軸受15,16と転がり軸受15,16の支持系とで形成される合成バネの剛性値は、電磁石17A,17Bの負の剛性値よりも大である関係を有するように設定される。アキシアル荷重の軽負荷領域では、永久磁石20がヨーク17a内に配置された電磁石17Aと、永久磁石20を含まない電磁石17Bとを併用する。
(もっと読む)
1 - 14 / 14
[ Back to top ]