
Fターム[4C601GA23]の内容
Fターム[4C601GA23]に分類される特許
1 - 6 / 6
超音波探触子
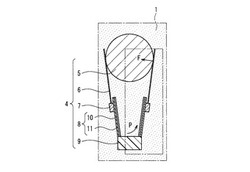
【課題】電気信号が伝達しなくなることによるノイズが減少し、超音波画像の画質を向上させることができる摺動接触装置を有する超音波探触子を提供する。
【解決手段】回転可能に構成された回転子と、回転子に設けられ、超音波信号と電気信号とを相互に変換する超音波振動子と、回転子に回転軸が同軸となるように接続されたスリップリング5と、スリップリング5に接触して超音波振動子に電気信号を伝達するブラシ6と、ブラシ6をスリップリング5に接触させるブラシ圧を変化可能なブラシ圧可変手段8と、回転子と、超音波振動子と、スリップリング5と、ブラシ6と、ブラシ圧可変手段8とを包含するウインドウと、ウインドウ内に充満された音響媒体1とを備える。
(もっと読む)
超音波プローブおよび超音波診断装置

【課題】超音波プローブの回転角度を検出する。
【解決手段】超音波プローブ100は、2Dアレイ振動子112を備えたプローブ本体部110と、プローブ本体部110を取り囲むように設けられてプローブ本体部110に対して回転可能なプローブ回転部120を備えている。さらに、超音波プローブ100は、プローブ本体部110に設けられる電極E1,E2と、プローブ回転部120と共に回転することにより電極E1との間の容量を変化させる電極E3を備えている。そして、電極E1〜E3がプローブ回転部120の回転角度を検出する静電容量方式の角度センサとして機能し、角度センサを利用して検出される回転角度に応じて、2Dアレイ振動子112によって送受波される超音波が制御される。
(もっと読む)
コントローラ
【課題】
ジョイスティックのような操作子や、マスタ・スレーブシステムにおいて制御精度が高いマスタ操作子として使用できる小型のコントローラを提供する。
【解決手段】
ステージ11と、操作子12と、ワイヤ駆動装置13と、操作子支持機構14と、ステージ移動装置15とを備え、ワイヤ駆動装置は、ワイヤの繰り出し長さにより操作子のステージ上の位置を特定するとともに、ワイヤを介して操作子の上端に引っ張り力を与え、ステージ移動装置は、操作子が操作子支持機構を介してステージに力を与えたときは所定量だけ前記ステージを移動させる、
(もっと読む)
超音波診断治療システム
【課題】処置部位の所望の位置に容易、且つ、的確に高密度の超音波エネルギーを照射可能な超音波診断治療システムを提供する。
【解決手段】プローブの先端部に設けられ、形状を変位することにより、治療用超音波出射手段から治療対象部位である患部までに超音波集束距離を変位せしめることにより、超音波観測手段により得られる観察領域を可変可能とするバルーン33aまたは湾曲部15の形状の変位を制御し、超音波集束距離の調整終了後に、前記治療用超音波出射手段からの収束した超音波が、超音波観測手段により観察される患部を含む観察領域に対して含まれるように制御する。
(もっと読む)
乳房の超音波診断装置とその画像表示方法
【課題】乳房のBモード像だけではなく、乳房表面から深さ方向に等距離にある断面像(Cモード像)も含めて、乳房の任意の断面の超音波画像を提供できるデータを取得することができる乳房超音波診断装置および超音波画像表示方法を提供する。
【解決手段】本発明による乳房超音波診断装置は、アーム2を介してリニア電子走査形超音波探触子3を支持し、体位調整により水平に保たれた乳房表面に対して前記探触子3が平行になるように直接接触するかまたは液体の音響媒体を介して設置する。超音波ビームを乳房内部に入射しつつ探触子3を乳頭13を中心に回転する。前記探触子3の傾斜角度θを遂次検出しながら回転して得られる乳房内の全ての超音波反射情報を記憶する。前記記憶データに基づいてデータを再構成することにより乳房の任意の断面の超音波画像を表示可能に構成されている。
(もっと読む)
超音波診断システム並びにそのロボット制御装置及びロボット制御プログラム
【課題】 被検者の心拍による血管の動きがあっても、血管の計測点と超音波プローブとの相対位置関係がほぼ一定にする。
【解決手段】 ロボット制御装置13は、被検者Mの心電波形に基づいてロボットアーム12の動作を予測制御する予測制御手段17を備えている。予測制御手段17は、超音波診断装置11からの超音波画像を使って所定時間内における血管位置のサンプル波形を求め、当該サンプル波形と前記所定時間の心電波形とを対応させ、当該心電波形の各ピーク間の各サンプル波形を平均化することにより、ピークからの経過時間に対する血管位置の予測波形を求め、前記被検者の心電波形及び前記予測波形に基づき、前記計測点と前記超音波プローブとの相対位置関係をほぼ一定に維持するようにロボットアーム12を制御する。
(もっと読む)
1 - 6 / 6
[ Back to top ]