
Fターム[5B047AA02]の内容
Fターム[5B047AA02]に分類される特許
1 - 6 / 6
カーソルの表示方法およびカーソルの表示プログラム
【課題】二次元画像の奥行き方向における位置の把握や指示をすることができるカーソルを表示するカーソルの表示方法、およびカーソルの表示プログラムの提供を目的とする。
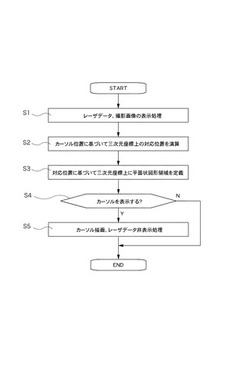
【解決手段】三次元座標上に分布するレーザ点群データ1を所定の視点位置により示した二次元画像内において移動操作自在に注目点を指示するカーソル2を表示するカーソルの表示方法であって、
前記二次元画像内の注目点の三次元座標上における対応位置を演算し、この対応位置を含み、視点位置方向に対して直交する所定の平面状図形領域3を前記対応位置を基準にして三次元座標上に定義し、
前記視点位置から平面状図形領域3内を通過する視野領域を平面状図形領域3を基準に分割し、いずれかの分割領域内に配置されたレーザ点群データ1を非表示処理してカーソルの表示方法を構成する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム及び記録媒体

【課題】本発明は、メモリの有効利用を図った画像処理装置、画像処理方法、画像処理プログラム及び記録媒体に関する。
【解決手段】複合装置1は、原稿を読み取って入力される画像データから複数のラインメモリを使用して画像特徴量を画素単位で抽出する像域分離処理を行って、該像域分離処理での抽出結果に基づいて画像データに対して所定の設定パラメータを用いて画像加工を施す画像加工処理と、所定のパターン画像の記録されている原稿から読み取ったパターン原稿画像データに基づいて複数のラインメモリを使用して該画像加工処理での該設定パラメータを設定する画像調整処理と、で共通のラインメモリ65を切り替えて使用し、画像処理に利用するラインメモリを有効活用する。
(もっと読む)
画像処理装置及び方法
【課題】遅延メモリの省容量化を実現しつつ、局所画像処理の回路規模の削減と、処理の高速化を図る。
【解決手段】画像データを複数のバンド領域に分割して処理する画像処理装置は、バンド領域の第1の方向に連続するN画素(N≧2)からなる画素群の読出処理を、前記第1の方向と直交する第2の方向へ順次に行うことにより、バンド領域を走査する。シフトレジスタは、この読出処理に応じて、第2の方向に連続する予め定められた数の画素群の画素データを順次に保持する。また、読出処理毎に、シフトレジスタから消去される画素データのうちの後に利用される画素データで、遅延メモリに保持されている不要になった画素データを置換することにより遅延メモリの内容を更新する。そして、読出処理毎に、新たに読み込まれた画素群を含む予め定められたサイズの処理対象領域の画素データをシフトレジスタと遅延メモリを用いて、画像処理部に提供する。
(もっと読む)
画像形成システムのプログラム及び画像形成システム
【課題】濃度調整用のパッチ画像の読み取りを行う場合に、パッチ画像周辺の白地領域を用いて白基準を作成し高精度でパッチ画像の濃度情報を得ることが可能な画像形成システムを得る。
【解決手段】このように、白地部の読み取りに影響する画像領域からの影響距離dを算出し、パッチ画像の濃度情報に対して、当該パッチ画像周辺部で影響距離dよりも離れた白地部の濃度情報に基づいてパッチ画像の濃度情報を補正する。
(もっと読む)
画像処理装置及び画像処理装置の制御方法
【課題】原稿サイズの検知に要する時間を大幅に短縮することができ、使い勝手のよい画像処理装置を提供する。
【解決手段】本発明の画像処理装置は、原稿台1011上に載置された原稿の主走査方向1列分の画像を読み取るラインセンサ1024と、該原稿台の内部において主走査方向及び副走査方向に移動可能に構成され、原稿台の所定箇所の原稿の存否を検出する原稿検出センサ1100と、該ラインセンサ1024によって該原稿台上に載置された原稿の主走査方向の長さを検知し保持する主走査方向長さ保持手段と、該主走査方向長さ保持手段が保持する長さと、規格長さと一致するか否かを判定する規格長さ判定手段と、を有し、該規格長さ判定手段によって、該主走査方向長さ保持手段が保持する長さが規格長さと一致しないと判定されたときには、該原稿検出センサ1100を移動させることを特徴とする。
(もっと読む)
雑草地図を構築するための機構
本発明は雑草地図を構築するための機構(100)に関する。この機構(100)は、ビデオカメラ(112)と待避トラックレーザカメラ(114)を有する画像記録ユニット(110;110’)、画像処理及び評価ユニット(120)、後者に接続されたデータ格納ユニット(130)、及び雑草データベース(135)を具備する。この機構(100)は、また光源(160)、位置検知素子(152)を備えた位置検出ユニット(150)、及び前者により供給された立体座標をさらに正確に決定するための位置較正素子(154)を具備している。画像記録ユニット(110;110’)、位置検出ユニット(150)及び光源(160)は全てが前記画像処理及び評価ユニット(120)とデータ通信接続状態である。さらに画像処理及び評価ユニット(120)には1つ以上の制御出力(122,124)が設けられており、制御出力の1つ(124)は別の雑草除去装置の制御ユニット(190)とデータ通信接続状態を確立することができる。 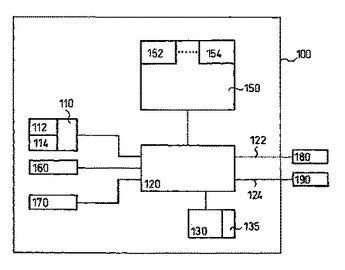 (もっと読む)
(もっと読む)
1 - 6 / 6
[ Back to top ]