
Fターム[5C086AA54]の内容
異常警報装置 (16,429) | 異常状態の種別 (3,234) | 間隔、距離 (297) | 近接(感電防止も含む) (176) | 接触、衝突、巻き込み(例;自動車) (88)
Fターム[5C086AA54]に分類される特許
81 - 88 / 88
携帯端末装置、衝突防止方法、衝突防止プログラムおよび記録媒体

【課題】 携帯端末装置自体に障害物の存在を操作者に対して報知する機能を持たせることで、携帯端末装置の操作者に対して障害物の存在を確実に報知し、障害物との衝突の可能性を大幅に低減させることのできる携帯端末装置を提供する。
【解決手段】 本発明の携帯端末装置は、携帯端末装置の周囲に存在する障害物を検知する障害物検知手段103と、上記携帯端末装置のユーザに対して、障害物の存在を報知する障害物報知手段104とを備える。上記障害物報知手段104は、上記障害物検知手段103によって障害物が検知されたときに、障害物の存在をユーザに対して報知する。
(もっと読む)
車両用発煙筒の着火制御装置

【課題】
車両事故により乗員が、発煙筒を使った後続車への告知ができない場合にも、車両が自動的に発煙筒を着火することで後続車へ事故を告知し被害拡大を防止する。また盗難防止機構との併用することも可能である。これにより事故にする二次災害の防止と盗難防止に有効な技術を提供することにある。
【解決手段】
上記課題は、車両の衝撃を検出する衝撃センサと、発煙筒を自動的に着火させる発煙筒自動着火装置と、発煙筒を車体内から車体外へ移動する発煙筒移動装置と、衝撃センサにより車両の衝突や異常な衝撃を検出したら、自動的に発煙筒の着火を行う発煙筒着火判定制御装置を備える車両用発煙筒制御装置により達成される。
(もっと読む)
危険警報システム
【課題】車両の後方を横切る物体を検出して他車両に危険の存在を通知し、より一層の安全を確保する「危険警報システム」を提供する。
【解決手段】第1の車両1に搭載された第1の危険警報装置9は、カメラ11により撮影した映像を画像処理して車両の後方を横切る物体Pの有無を監視している。そして、車両の後方を横切る物体Pを検出すると、その検出結果に基づいて危険の有無を判定し、通信部を介して周囲の車両に警報信号を発信する。警報信号には、カメラ11で撮影した物体Pの映像と、第1の車両1の位置及び向きを示す情報とが含まれる。第2の車両2に搭載された第2の危険警報装置9は、警報信号を受信すると、自車両が発信元車両に向う道路の対向車線上に位置しているか否かを判定し、自車両が発信元車両に向う道路の対向車線上に位置している場合は音声又は映像により運転者に警報を通知する。
(もっと読む)
車両用衝突時間推定装置及び車両用衝突時間推定方法
【課題】衝突時間の算出を容易にすると共に、位置検出誤差に対してロバストな出力を得ることを可能にする。
【解決手段】撮像手段2が車両周囲の画像を撮像し、エッジ抽出手段3が撮像手段2が撮像した画像の中からエッジ画像を抽出し、エッジ幅規格化手段4がエッジ抽出手段3により抽出されたエッジ画像のエッジ幅を規格化し、投票手段5が、エッジ幅規格化手段4により規格化されたエッジ画像について、エッジ画像が検出された位置に対応するカウント値を増数すると共に、エッジ画像が検出されなかった位置に対応するカウント値を初期化し、移動速度検出手段6がカウント値の傾きに基づいてエッジ抽出手段3により抽出されたエッジ画像の移動方向と移動速度を算出し、衝突時間算出手段7が、移動速度検出手段6により算出されたエッジ画像の位置及び移動速度を利用して、対象物との衝突時間を算出する。
(もっと読む)
車両用衝突警報装置及び車両用衝突警報方法
【課題】自車両との衝突可能性がある対象物との衝突時間のみを効率よく算出する。
【解決手段】撮像手段2が、車両周囲の画像を撮像し、動き量算出手段3が、撮像手段2が撮像した画像から縦方向及び横方向のエッジ画像を抽出し、縦方向及び横方向のエッジ画像の動き量を算出し、情報抽出手段4が、動き量算出手段3の算出結果に従って、衝突可能性がある対象物が含まれる画像領域を注目領域として抽出し、衝突時間算出手段5が、情報抽出手段4により抽出された注目領域内に含まれる横方向エッジの縦方向の位置及び移動速度を利用して、対象物との衝突時間を算出し、報知/制御手段6が、衝突時間算出手段5により算出された衝突時間に従って、衝突可能性がある旨を報知、又は衝突を回避するように車両を制御する。
(もっと読む)
車両用走行軌跡推定装置
【課題】 停止した車両が発進する場合に、発進後の走行軌跡を精度良く推定できるようにする。
【解決手段】 停止状態判定手段M5が車両の停止を判定しているとき、あるいは車速センサ11で検出した車速が所定値以下であり、かつヨーレートセンサ12で検出した単位時間あたりのヨーレートの変化量が所定値以上のとき、つまりヨーレートセンサ12が出力するヨーレートの信頼性が低いとき、推定走行軌跡出力手段M4は、ヨーレートを用いて第1走行軌跡推定手段M1が推定した車両の将来の走行軌跡を出力せずに、走行軌跡算出手段M2が算出した車両の過去の走行軌跡に基づいて第2走行軌跡推定手段M3が推定した車両の将来の走行軌跡を出力するので、停止した車両が発進する場合においても発進後に出力される将来の走行軌跡を精度を高めることができる。
(もっと読む)
マルチセンサ侵入検出システム
好ましくは、電磁スペクトラムの異なる波長範囲の2つ以上の検出器を使用する鉄道のプラットフォームに適した侵入検出システムが開示される。この検出器は、レーザスキャナとCCTVステレオカメラとであり得る。2つの検出器からの信号は、両方の検出器に侵入を示すように要求することによって、誤警告を回避するように処理される。領域のための背景輪郭が格納され、例えば人間の存在を決定する検出器の1つとともに使用される。処理は、両方の検出器に、同時に同じ場所で存在を検出することを要求する。各検出器は、明るさ水準の変化のような周囲の条件の変化を相殺する手段を含み得る。 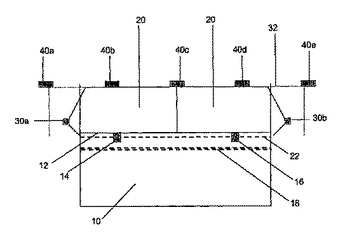 (もっと読む)
(もっと読む)
局所的な事故通知
局所的な事故通知システムは、車両の衝突を検出する事故検出器(12)と、車両が外部へ警報を発して、衝突の付近にいる人達に通報する警報機(14)と、からなる。事故検出器(12)から衝突の通報を受けて、コントローラ(16)が、警報を鳴らすよう警報機に指示する。警報機は特定の警報特性を有する。盗難警報と区別するために、事故検出器(12)は車両のイグニションがオンの時のみ作動するようにしてもよい。事故検出器(12)は加速度計(20)、エアバッグ検出器(24)、あるいは傾斜センサ(22)を備えてもよい。  (もっと読む)
(もっと読む)
81 - 88 / 88
[ Back to top ]