
Fターム[5D057BB02]の内容
テープカセットのオートチェンジャー (871) | 把持部の構造 (72) | カセット把持部 (67) | 挟持型 (14)
Fターム[5D057BB02]の下位に属するFターム
Fターム[5D057BB02]に分類される特許
1 - 6 / 6
ライブラリ装置
【課題】アクセッサ機構の移動経路内の塵埃を自動的に除去可能なライブラリ装置を提供する。
【解決手段】ライブラリ装置は、記録媒体を収納するセルを複数備えたマガジンと、記録媒体に情報の記録および再生を行うドライブ装置と、ドライブ装置およびセルに対して記録媒体の出し入れを行うピッカ手段と、ピッカ手段を搭載しピッカ手段が取り出した記録媒体をドライブ装置と各セルとの間で搬送するアクセッサ手段と、を有し、ピッカ手段が、記録媒体と連結した状態でドライブ装置またはセルに対して離れるまたは近づく方向に移動して記録媒体の出し入れを行い、ピッカ手段の移動に連動して、ピッカ手段の底部に対向する対向領域の移動経路上の塵埃を除去する除去手段を有する。
(もっと読む)
アライメント調整装置、ライブラリ装置及びアライメント調整方法

【課題】 カートリッジ等の被搬送物を搬送するロボットのアライメント調整を自動化し、安定したハンドリングを可能にすることにある。
【解決手段】 アライメント調整装置、ライブラリ装置又はアライメント調整方法であって、収納棚(10)に被搬送物(カートリッジ4)を搬入し、又は収納棚から被搬送物を搬出する少なくとも2つのロボット(6、8)を備え、ロボットの1つでセルアクセスの異常が発生した場合に基準フラグ(18A、18B、18C)の測定前に、アクセスの異常時のロボットから別のロボットに切り替えてアクセスを行い、複数のロボットにセルアクセスの異常が発生した場合、対象セルフラグ(19)を測定する。また、複数のロボットにエラーが発生する場合、セル側の経年変化を判断し、対象セルフラグの再測定を行う。
(もっと読む)
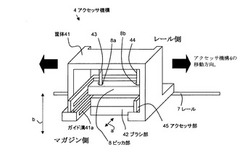
ライブラリ装置及びカートリッジの搬送方法
【課題】設置面積を抑制してカートリッジの収容効率を向上させることができ、設備費用を低減できるライブラリ装置及びカートリッジの搬送方法を提供する。
【解決手段】複数のカートリッジ2を収容可能なセル1と、カートリッジ2との間でデータの記録又は再生を行うドライブと、セル1とドライブとの間でカートリッジ2を搬送するアクセッサー4と、を備えたライブラリ装置であって、セル1には、収容したカートリッジ2を配列する方向に沿って延びる第1ラックギア11が形成され、アクセッサー4は、第1ラックギア11の延在方向に沿って延びるとともに第1ラックギア11に対応して形成された第2ラックギア43を備えるアクセッサーベース41と、第1、第2ラックギア11,43に噛み合うピニオンギア6a,6b、ピニオンギア6a,6bを駆動する駆動部5、及びカートリッジ2を保持する保持部42aを備えるフィードブロック42と、を有する。
(もっと読む)
オートローダ装置、ライブラリ装置、ライブラリ装置のカートリッジロード方法
【課題】 オートローダ装置単体で、ドライブへ装填するカートリッジの誤認識の検出、回復処理を可能とし、自動連続運転が可能なオートローダ装置、ライブラリ装置、ライブラリ装置のカートリッジロード方法を提供する。
【解決手段】 磁気テープカートリッジ105は、固有情報を格納する第1メモリ106を設け、ドライブ制御部111は、磁気テープドライブ110に設ける第1メモリリーダ112で読み出した固有情報を格納する第2メモリ113を設け、トランスポータ制御部108は、第1メモリ106の固有情報を格納する第3メモリ115と、第2メモリ113の格納情報と第3メモリ115の格納情報とを比較する固有情報比較手段117と、ロードリトライを実行するリトライ制御手段118とを設ける。
(もっと読む)
傾きの検出方法および傾き検出装置並びに物体の位置制御方法および位置制御装置
【課題】正確に物体の姿勢すなわち傾きを特定することができる傾きの検出方法や傾き検出装置を提供する。
【解決手段】 平面からCCD43に投影される2点101a、101b間の画素数は平面およびCCD43間の距離に応じて増減する。同様に、平面からCCD43に投影される2点101c、101d間の画素数は平面およびCCD43間の距離に応じて増減する。2つの画素数の比率Wd/Dwに基づき平面に対してCCD43の傾きは特定されることができる。CCD43の向きに応じて物体の姿勢すなわち傾きは導き出されることができる。こうして正確に物体の姿勢すなわち傾きは特定されることができる。
(もっと読む)
収納棚用搬送機構およびその制御方法
【課題】常に稼働し続けることができる収納棚用搬送機構およびその制御方法を提供する。
【解決手段】収納棚13a、13bに区画されるセル14に対してアクセスの指示を受け取ると、第1自走搬送機19に組み込まれる動力源に基づき第1自走搬送機19を駆動する。このとき、第1自走搬送機19で障害が検出されると、第2自走搬送機21の動作に基づき第1自走搬送機19を駆動する。こういった制御方法によれば、たとえ第1自走搬送機19に障害が発生しても、第2自走搬送機21の動作に基づき第1自走搬送機19は駆動することができる。例えば第2自走搬送機21の可動範囲から第1自走搬送機19は退去することができる。こうして第2自走搬送機21の可動範囲は確保される。第2自走搬送機21は稼働し続けることができる。収納棚用搬送機構18の動作は継続される。
(もっと読む)
1 - 6 / 6
[ Back to top ]