
Fターム[5H004GA28]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 監視 (8)
Fターム[5H004GA28]に分類される特許
1 - 8 / 8
発電プラント性能を予測する方法およびシステム

【課題】発電プラント性能、可用性、および劣化を頑強に予測する。
【解決手段】ハイブリッド予測モデル(150)を用いて発電プラントまたは発電プラントの部品の性能、可用性、または劣化の1または複数を予測する。ハイブリッド予測モデル(150)は少なくとも2つのモデル成分を含んでおり、1つは物理ベースのモデリング・アプローチ(152)に基づくもの、1つは観測に基づくかまたはデータ・ベースのモデリング・アプローチ(154)に基づくものである。ハイブリッド予測モデル(150)は、運転性能が時間とともに変化するときに自己調節または自己補正する場合がある。
(もっと読む)
制御装置、電子制御ユニット、異常検出方法

【課題】ECUに搭載されたCPUと、ECUに供給される入力データの供給元の異常を判別できる制御装置を提供すること。
【解決手段】 第1のデータを出力し、前記第1のデータの後、第2のデータを出力するデータ出力手段22と、第1のデータから前記第2のデータを予測して予測データとして出力するデータ予測手段16と、第2のデータに演算を行う第1の演算手段Aと、前記予測データに演算を行う第2の演算手段Bと、前記第1の演算手段が前記第2のデータに演算を施した第1の出力値と、前記第2の演算手段が前記予測データに演算を施した第2の出力値と、を比較する比較手段17と、を有することを特徴とする制御装置100を提供する。
(もっと読む)
シミュレーション評価システム
【課題】シミュレーションにより得られるプラントの動的挙動の予測を適切に評価ことを可能とする。
【解決手段】実プラントから取得した実データによりシミュレーションモデルのパラメータを修正するプロセスシミュレーション部からのデータに基づき、シミュレーション結果を評価するシミュレーション評価システムにおいて、規定された時間分の予測データを出力する定期予測シミュレーション部と、現在値及び予測データを入力し、この予測データを所定条件でグループ化したラベリング情報を出力すると共に、状態の変化が所定値を超えたときに解析実行メッセージを出力する状態判別部と、予測データ並びにラベリング情報及び現在値を保存するシミュレーションデータベースと、解析実行メッセージを入力したとき、保存されている予測データ、ラベリング情報、現在値を取得して予測データに対する解析を実行し、解析結果を出力する予測データ解析部とを備える。
(もっと読む)
監視制御装置の二重化切換方式
【課題】より簡潔な論理で監視制御装置の切換を行うことができる監視制御装置の二重化切換方式を提供することにある。
【解決手段】監視制御装置S−1、S−2は制御部S−11、S−21と処理部S−12、S22とを有し、二重化されている制御部と処理部とは一方を運転系として動作させ、他方を待機系として動作させるものにおいて、運転系処理部が異常となり、制御部との通信が異常となったとき、制御権を放棄するとともに待機系に対して制御権取得命令を送信して待機系への移行処理を行うものである。
(もっと読む)
シミュレーション装置
【課題】シミュレーション演算部から出力される模擬信号の状態にかかわらず、エンジン制御装置の動作を確実にモニタできるシミュレーション装置を提供する。
【解決手段】エンジンを模擬してエンジンの状態を表すエンジン状態信号をエンジン制御装置7に出力するシミュレーション演算部(モデル演算部)2と、エンジン制御装置から入力されるエンジン制御信号を計測して当該エンジン制御信号に基づく計測データを出力する信号計測部3とを備えてなるシミュレーション装置であって、信号計測部3は、シミュレーション演算部2が模擬しているエンジンの回転状態が正回転状態である場合には、計測したエンジン制御信号に基づく計測データを出力し、シミュレーション演算部2が模擬しているエンジンの回転状態が停止状態と逆回転状態の少なくとも一方である場合には、予め設定された擬似計測データを出力する。
(もっと読む)
モデル作成装置並びにプロセス異常分析装置およびそれらの方法並びにプログラム
【課題】 同一のレシピのサンプル数が少なくても精度の高い品質−モデルを作成できるモデル作成装置を提供すること
【解決手段】 プロセスが実行されている期間中に時系列に取得されるプロセスデータからプロセス特徴量を抽出するプロセスデータ編集部22と、そのプロセスで処理された対象品の検査結果についての情報である検査データ中の計測値と、設計値と、の差分を求める検査データ編集部27と、プロセス特徴量と検査データとを用いて、データマイニングや多変量解析による解析を実行する際に、検査データ編集部で求めたプロセス処理の結果得られた計測値とその設計値との差分を目的変数とし、抽出したプロセス特徴量データを説明変数としてプロセス−品質モデルを作成する解析部32と、を備えた。差分を目的変数とすることで、異なるレシピから得られたデータをサンプルとして使用できるので、必要なサンプル数を容易に取得し、高精度なモデルが作成できる。
(もっと読む)
最適化された大気汚染制御
多段階制御機(610)は、工程を行うシステム(620)の稼動を指示する。前記工程は、複数の工程パラメータ(MPP)(625)を有するが、MPP(625)の1つ以上が制御可能な工程パラメータ(CTPP)(615)であり、MPP(625)の1つが目標設定工程パラメータ(TPP)(625)である。前記工程は、長さTPLAAV2の定義された時間におけるTPP(625)の実際平均値(AAV)に対する第1の限界を示す定義された目標値(DTV)を有する。前記AAVは、定義された期間におけるTPPの実際数値(AV)に基づいて計算される。第1論理制御器(630)は、少なくとも長さがTPLAAV2であり、現在時点T0から未来時点TAAV2まで延長される第1未来時間(FFTP)においてTPPの未来平均値(FAV)を予測し、このとき、前記TAAV2以前にTPP(625)が定常状態に移動する。FAVは、(i)長さがTPLAAV2以上であり、過去時点T−AAV2から現在時点T0まで延長される第1過去時間(FPTP)における様々な時点でのTPP(625)のAAV、(ii)MPP(625)の現在値、及び(iii)DTVを基にして予測される。第2論理制御器は、TPLAAV2の長さより短くTPLAAV1と等しい長さを有し、現在時点T0から未来時点TAAV1まで延長される第2未来時間(SFTP)の間にTTP(625)のAAVに対する第2の限界を示す追加的目標値(FTV)を確立する。FTVは、FFTPにおいて予測されたTPP(625)のFAVのうちの1つ以上に基づいて確立される。また、第2論理制御器は、(i)TPLAAV1の長さを有し、過去時点T−AAV1から現在時点T0まで延長される第2過去時間(SPTP)における様々な時点でのTPP(625)のAAV、(ii)MMP(625)の現在値、及び(iii)FTVに基づき、CTPP(615)各々に対する目標設定点を決める。第2論理制御機は、前記CTPP(615)に対して決められた目標設定点に従ってCTPP(615)各々の制御を指示する論理をさらに有する。 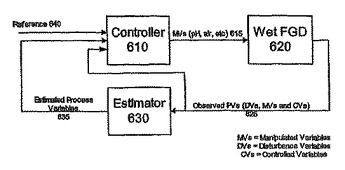 (もっと読む)
(もっと読む)
電気的製造制御に対する確率制約最適化
本発明の方法は、デバイスを製造するためのプロセスのモデルを定義することを含み、プロセスは複数のステップを含んでいる。複数のインラインプロセスターゲットが、プロセスステップの少なくとも一つのサブセットに対して定義される。モデルはインラインプロセスターゲットを複数のプロセス出力パラメータに関係づける。インラインプロセスターゲットに対する、確率制約の第1セットが定義される。プロセス出力パラメータに対する、確率制約の第2セットが定義される。目的関数が、モデルと複数のプロセス出力パラメータに基づき定義される。プロセス出力パラメータのトラジェクトリが、各プロセスステップにおけるインラインプロセスターゲットに対する値を決定するために、各プロセスステップに対して、確率制約の第1及び第2セットを条件として目的関数を最適化することにより決定される。各プロセスステップの終了後に、残りのプロセスステップに対して最適化を繰り返す。  (もっと読む)
(もっと読む)
1 - 8 / 8
[ Back to top ]