
Fターム[5H004KB05]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | PID制御又はその類型 (1,013) | Iの使用 (307) | Iのみの使用 (9)
Fターム[5H004KB05]に分類される特許
1 - 9 / 9
制御装置
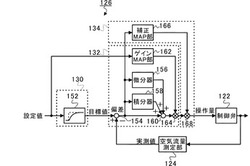
【課題】設定値に応じた適切な目標値と適切なゲイン補正とを通じて、制御対象の安定した制御を実行する。
【解決手段】制御装置126は、所望する設定値に所定の第1伝達関数を施して目標値を生成する目標値生成部130と、目標値から実測値を減算した偏差に所定の第2伝達関数を施して操作量を導出するフィードバック制御機能部132と、偏差に基づくゲイン補正係数を、フィードバック制御機能部の操作量に乗算するゲイン補正機能部134とを備える。
(もっと読む)
プロセス制御装置、プロセス制御方法およびプロセス制御プログラム

【課題】むだ時間を有する制御対象に対して、オーバーシュートが小さく、整定時間が短く、さらに外乱抑制特性および設定変更特性が良好なプロセス制御装置を提供することを目的とする。
【解決手段】制御対象2について検出される制御量PVが入力され、制御量に基づき、制御量を調整するための操作量MVを出力して制御量を所定の目標値に制御するプロセス制御装置1であって、目標値から制御量を減算する第1減算部3と、第1減算部からの出力値を積算する積算部4と、積算部の出力値を定数倍する第1乗算部5と、制御開始時における制御量である初期制御量を保存する初期制御量記憶部7と、初期制御量記憶部に保存された初期制御量から現時点の制御量を減算する第2減算部8と、第2減算部からの出力値を定数倍する第2乗算部9と、第1乗算部の出力値と第2乗算部の出力値とを加算して操作量として出力する加算部10とを備える。
(もっと読む)
波動歯車減速機の温度変化に伴う摩擦特性変動を考慮したアクチュエータの適応型摩擦補償法
【課題】温度センサを用いずに温度変化に伴う波動歯車減速機の摩擦特性変動下における制御性能の向上を達成可能なアクチュエータの適用型摩擦補償方法を提案すること。
【解決手段】波動歯車減速機1を備えたアクチュエータ2の適応型摩擦補償法では、モータ駆動電流に印加する摩擦補償電流として、モータ軸6が偏差を持って静止した際には静止摩擦補償電流isを採用し、それ以外の場合にはクーロン摩擦補償電流icを採用する。静止摩擦補償電流isはステップ関数の補償量issに単調増加なランプ関数の補償量isrを加えたものであり、クーロン摩擦補償電流icとしてステップ関数の補償量icsを用いる。位置決め制御の応答中のデータに基づき摩擦補償量を適応的に変化させることができるので、周囲温度が変化して波動歯車減速機1の摩擦特性が変動しても、モータ軸6を大きな振動を伴うことなく目標角度に整定可能である。
(もっと読む)
モータの制御方法及び装置
【課題】 モータの出力をできるだけ大きなトルクで減速し、しかも、位置決め時のオーバーシュートが小さく、高速に位置決めできる定位置停止制御装置を実現する。
【解決手段】 モータMの回転子の回転速度がオリエンテーション速度になった後、制御部7は、位置ループ速度指令vcにより指令された速度と2乗速度v2との偏差を速度制御器4に与える。速度制御器4から出力されたトルク指令tcに、制御部7が決定したトルク加算指令acを加算部ADで加算して得た加算トルク指令atcをトルク制御器6に与える。オリエンテーション制御に用いる物理変数を用いて定めたスライディングカーブに沿って回転子の位置及び速度を制御することにより、回転子を目標位置に停止させるスライディングモード制御によりトルク制御器の入力を調整する。
(もっと読む)
むだ時間同定装置
【課題】 制御対象の特性によらず、容易にかつ確実に正確にむだ時間を同定することができるようにする。
【解決手段】 モータ速度を入力し前記モータ速度が発振しているかどうかを判定した結果を示す発振検出信号を出力する発振検出器106と、前記モータ速度を入力しその入力信号に基づいて制御対象のメカパラメータを同定し出力するメカ同定器107と、前記発振検出信号を入力し前記モータ速度は発振していなければ速度制御器に設定するパラメータである制御ゲインをさらに大きい値として出力する制御ゲイン調整器108と、制御ゲインと発振検出信号とメカパラメータを入力し臨界周波数を出力する臨界周波数演算器109と、前記制御ゲインと前記発振検出信号と前記メカパラメータと前記臨界周波数を入力しむだ時間同定値を算出するむだ時間同定器110と、を備える。
(もっと読む)
二次元型テーブル微小角度駆動機構の制御ループ
【課題】従来の二次元型テーブル微小角度駆動機構の制御ループは、第1〜第4ヒンジの共振が考慮されていないので、第1〜第4ヒンジの共振によって駆動誤差が生じる。
【解決手段】本発明による二次元型テーブル微小角度駆動機構の制御ループは、第2減算部300と第2乗算部400との間に介在され、第1補償乗算部810、第1積分部820、第2補償乗算部830、第2積分部840、及び加算部850から構成される補償演算手段800によって、機構部700の共振周波数ω0とダンピング比ζとを用いた補正角速度偏差850aが生成される構成である。
(もっと読む)
サーボ制御装置とその調整方法
【課題】 モータ制御装置単体でかつ、自動的に応答誤差調整を行なうことができるサーボ制御装置とその調整方法を提供する。
【解決手段】 位置制御器と、積分制御を有した速度制御器と、移動方向反転からの移動量を計測する移動量測定器(204)と、移動量が所定値に達するまで前記積分制御の積分ゲインを増加させる応答誤差補償器とを有するサーボ制御装置において、モデルに基づいて理想位置を演算する位置制御モデル部(201)と、モデル位置と実際位置との偏差から応答誤差を推定する応答誤差推定器(205)と、テストプログラムを実行した前記応答誤差を低減する積分ゲイン補正部(207)とを備えた。
(もっと読む)
システム同定装置およびそれを備えたモータ制御装置
【課題】 可動範囲が限定された負荷の連結したモータの慣性モーメント、粘性摩擦、クーロン摩擦を、微少範囲で高精度に同定することができるシステム同定装置およびそれを備えたモータ制御装置を提供する。
【解決手段】 システム定数同定器が、位置フーリエ係数とトルク指令フーリエ係数に基づいてシステム定数同定値を算出して出力するシステム定数演算器103を備え、また、前記システム定数同定器が、モータ位置に基づいて前記位置フーリエ係数を算出して出力する位置フーリエ変換器101と、トルク指令に基づいて前記トルク指令フーリエ係数を算出して出力するトルク指令フーリエ変換器102と、を備える。
(もっと読む)
モータ制御装置
【課題】
粘性摩擦を同定でき、その同定結果を使用して摩擦補償を行い、精度よくイナーシャを同定することができるモータ制御装置を提供する。
【解決手段】
速度指令Vrefとモデル速度Vfb’のモデル速度偏差を制御処理してモデルトルク指令を生成するモデル速度制御手段(5)と、モータ速度Vfbに係数Dを乗算して補償トルク指令を生成する補償トルク生成部(18)と、第1トルク指令と補償トルク指令を加算し第2トルク指令を生成するトルク補償手段(17)と、イナーシャを算出するイナーシャ算出手段(19)とを備え、イナーシャ算出手段(19)は、第1モータトルク指令を時間積分してモータトルク指令積分値ITrefとモデル速度制御手段が生成するモデルトルク指令を時間積分したモデルトルク指令積分値ITref’との比からイナーシャJを算出するようにした。
(もっと読む)
1 - 9 / 9
[ Back to top ]