
株式会社ハーモニック・ドライブ・システムズにより出願された特許
1 - 10 / 91
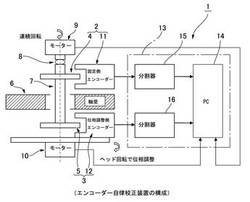
角度検出器の自律校正方法、角度検出器、円周目盛校正装置および角度検出器の校正装置
【課題】逐次2点法を用いて1回転の各角度位置において目盛誤差を精度良く算出可能な角度検出器の自律校正方法を提案すること。
【解決手段】角度検出器の自律校正方法は、第1目盛読取ヘッド11と第2目盛読取ヘッド12を、1回転を整数等分せず、且つ、複数回転Nを整数M等分する角度間隔αで配置し、目盛円板がN回転する間における第1、第2目盛読取ヘッド11、12の読みを、予め定めたデータサンプリング間隔でデータ読取装置13に取り込む。データ読取装置13では、第1、第2目盛読取ヘッド11、12の読みの差から、データサンプリング間隔で得られる、目盛円板4、5の角度目盛誤差に関する逐次2点法によるデータを生成し、複数回転N分のデータの平均がゼロになることを利用して、データを合成することで、目盛円板4、5の目盛誤差(校正値)をデータサンプリング間隔で求める。
(もっと読む)
テーパ型の可撓性外歯車を備えた波動歯車装置

【課題】波動歯車装置の可撓性外歯車の撓みに起因して外歯の歯底リム表面に発生する曲げ応力を平均化してその低減を図ることにより、波動歯車装置の伝達トルクを高めること。
【解決手段】波動歯車装置1の可撓性外歯車3の歯筋に沿った軸直角断面の楕円状リム中立線の長軸の半径方向の撓み量をw=κmn(mは両歯車の歯のモジュール、nは剛性内歯車と可撓性外歯車の歯数差の1/2、κは撓み係数)、当該軸直角断面のリム厚をtとした場合に、可撓性外歯車3の外歯34における歯筋方向の各軸直角断面において、tとwの積twが一定となるように外歯34に転位が施されている。
(もっと読む)
波動歯車装置を備えたアクチュエータの位置決め装置
【課題】スライディングモード制御により波動歯車装置の非線形特性を補償するアクチュエータの位置決め装置を提案すること。
【解決手段】位置決め装置のスライディングモード制御器は、位置指令θl*、制御対象を表す状態変数xを入力として制御対象への制御入力uを生成する。制御対象は次式で規定する。
スライディングモード制御系の切換面は設計変数Sで規定する。
制御入力uは、σを切換関数、kを切換ゲイン、として、線形状態フィードバック制御項ulと非線形制御入力項unlの和である。 (もっと読む)
(もっと読む)
波動歯車装置
【課題】減速時、増速時、停止時におけるラチェッティングおよび各部の塑性変形を防止できる簡単な構成のラチェット防止機構を備えた波動歯車装置を提案すること。
【解決手段】波動歯車装置1では、回転入力軸5と波動発生器4の間に摩擦円板7Aを挟み、摩擦円板7Aの摩擦係合力によって回転入力軸5から波動発生器4に入力トルクを伝達するようにしている。波動発生器側トルクは出力側トルクに比べて十分に小さく、波動歯車装置1の運転モード(減速時、増速時、停止時)によって大幅に変化することがない。また、波動発生器4と回転入力軸5の間の滑りが、波動歯車装置1の減速時における剛性内歯歯車2と可撓性外歯歯車3の間のラチェッティングトルク値の60〜75%で発生するようにしている。よって、両歯車がラチェッティング状態に陥る前に歯部などに生ずる塑性変形も未然に防止できる。
(もっと読む)
磁気式アブソリュートエンコーダー
【課題】電磁ブレーキ付きモーターの回転位置を検出する磁気式アブソリュートエンコーダーの検出精度および信頼性を高めること。
【解決手段】磁気式アブソリュートエンコーダー20は2対のホール素子31〜34を備えた多極磁気エンコーダー21と2対のホール素子41〜44を備えた2極磁気エンコーダー22を備え、電磁ブレーキ9に隣接配置されている。各ホール素子31〜34の検出信号を合成することにより2極磁気エンコーダー22および電磁ブレーキ9の洩れ磁束によるノイズを除去し、ホール素子41〜44の検出信号を合成して電磁ブレーキ9の洩れ磁束によるノイズを除去して検出精度を確保している。多極および2極の磁気エンコーダーの検出信号から算出したモーター回転軸の回転位置を比較して異常の発生を監視し、検出動作の信頼性を確保している。
(もっと読む)
回転検出器およびその位相誤差補正方法
【課題】簡易な演算のみによって2相信号の位相誤差を補正可能な回転検出器を提案すること。
【解決手段】回転検出器1のセンサ部3から発生するA相センサ信号Va0とB相センサ信号Vb0の位相誤差φを事前に測定しておく。また、2相信号からオフセット補正が施された振幅AのA相信号Va(=Asinθ)、振幅BのB相信号Vb(=Bcos(θ−φ))を生成するために用いる振幅A、Bと、A相信号Va、B相信号Vbにゲイン補正を施して、A相補正信号Va1(=r1・Asinθ)、B相補正信号Vb1(=r2・Bcos(θ−φ))を生成するために用いる調整ゲインr1、r2とが、{(r2・B/r1・A)}cosθ=1と(r2・B)/A=1を共に満足するように、これらの値を調整しておく。これにより位相誤差が補正されたA相補正信号Va1、B相補正信号Vb1が得られ、これに基づき回転角度θが算出される。
(もっと読む)
プリズムおよびその設計方法、ならびに角度センサ
【課題】測定光のプリズムへの入光・出光損失を低減させ、角度センサの検出精度を向上させること。
【解決手段】角度センサ1は、断面二等辺三角形の三角柱形状のプリズム2を備える。入射面2Aと出射面2Bによって規定されるプリズム2の頂角θpは、プリズムの屈折率をnpri、空気の屈折率をnairとすると、以下の関係式(3)を満たす角度である。
θp=2×(90−(sin−1(nair/npri)))・・・(3)
プリズム素材がBK7(屈折率npri=1.5163)であるとき、θpの適正値は97.45〜98の範囲内である。プリズム2の入射面2Aから測定光Lを入光し、境界面2Cで反射光Lrと透過光Ltに分離する。出射面2Bから出射する反射光Lrと境界面2Cから出射する透過光Ltを受光部3r、3tにより検出し、受光部3r、3tの差動出力に基づき、測定光Lの角度を検出する。
(もっと読む)
波動歯車減速機の温度変化に伴う摩擦特性変動を考慮したアクチュエータの適応型摩擦補償法
【課題】温度センサを用いずに温度変化に伴う波動歯車減速機の摩擦特性変動下における制御性能の向上を達成可能なアクチュエータの適用型摩擦補償方法を提案すること。
【解決手段】波動歯車減速機1を備えたアクチュエータ2の適応型摩擦補償法では、モータ駆動電流に印加する摩擦補償電流として、モータ軸6が偏差を持って静止した際には静止摩擦補償電流isを採用し、それ以外の場合にはクーロン摩擦補償電流icを採用する。静止摩擦補償電流isはステップ関数の補償量issに単調増加なランプ関数の補償量isrを加えたものであり、クーロン摩擦補償電流icとしてステップ関数の補償量icsを用いる。位置決め制御の応答中のデータに基づき摩擦補償量を適応的に変化させることができるので、周囲温度が変化して波動歯車減速機1の摩擦特性が変動しても、モータ軸6を大きな振動を伴うことなく目標角度に整定可能である。
(もっと読む)
波動歯車装置を備えたアクチュエータの位置決め制御方法
【課題】波動歯車装置を備えたアクチュエータにおいて、波動歯車装置の非線形ばね特性に起因する負荷軸の位置決め制御に対する影響を厳密な線形化手法を用いて補償すること。
【解決手段】制御対象のアクチュエータから、厳密な線形化手法を用いて線形化されたプラントモデルを構築する。波動歯車装置の負荷トルクに対する非線形な弾性変形を測定する。測定結果を再現できるように、非線形ばねモデルτg(θtw)を定数項を零とした三次多項式で規定する。負荷加速度指令を指令値とした際のプラントモデルへの電流入力および当該プラントモデルのモータ位置を、フィードフォーワード電流指令およびフィードフォーワードモータ位置指令として、負荷軸の位置決め制御用のセミクローズドループ制御系に入力する。
(もっと読む)
クロスローラーベアリング用リテーナおよびクロスローラーベアリング
【課題】隣接するコロの間を一定に保持可能なグリース溜まりを備えた簡単な形状のクロスローラーベアリング用のリテーナを提案すること。
【解決手段】クロスローラーベアリングのリテーナ6は、軌道4aの矩形断面に対応する矩形輪郭のリテーナ本体板11を備えている。リテーナ本体板の両側の矩形側面12、13は、その対角線上の一方の角14から他方に角15に向かって相互に接近する方向に傾斜した傾斜平面であり、また、軌道4aに装着した状態においてベアリング中心に向かって延びている。矩形側面12、13の中心部分には、所定深さのグリース溜まり用の凹部16、17が形成されており、これらは貫通孔18を介して連通している。矩形側面12、13は隣接するコロの円形外周面に対して線接触し、これらを一定の間隔に保持する。
(もっと読む)
1 - 10 / 91
[ Back to top ]