
Fターム[5H004KB22]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | 補償要素を用いるもの (61) | 位相遅れ要素の使用 (14)
Fターム[5H004KB22]の下位に属するFターム
2次以上の遅れ要素の使用
Fターム[5H004KB22]に分類される特許
1 - 14 / 14
モータ駆動装置の位置制御方法
【課題】位置比例積分制御系は、位置偏差の定常偏差を0にする利点があるが、モータ位置が指令位置を追い越すオーバーシュートがおきやすい欠点がある。
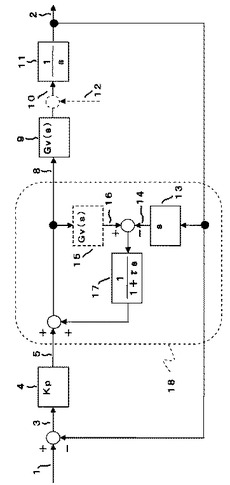
【解決手段】位置指令1とモータ位置2の差から位置偏差3を算出し、これに位置比例ゲイン4を乗じた位置比例出力5を計算する位置比例制御系に、速度制御指令8を速度制御モデル15に通したモデル出力16と、モータ位置2を速度検出器13で微分したモータ速度14の差をとり、一次遅れフィルタ17を通した出力を、再び速度制御指令8に加算する速度誤差補正機能を備える。
(もっと読む)
プラントの制御装置

【課題】 偏差に基づく補償動作の遅れを補い、目標値の変動に遅れなく追従し、応答性を向上させる。
【解決手段】 設定された目標値と制御量との偏差に基づいて、フィードバック制御するプラントの制御装置30であって、バルブ13に入力されるバルブ開度Vと制御対象から出力される流量fとの入出力特性をあらかじめ記憶し、この入出力特性に基づき、目標値に対応するバルブ開度Vを特定するとともに、目標値が変動するタイミングにおいて、変動する目標値から特定されるバルブ開度Vをバルブ13に入力するフィードフォワード制御手段と、を備える構成としてある。
(もっと読む)
二自由度制御装置とその制御方法
【課題】 無駄時間を含む制御対象に対しても,前置補償器を最適に設定することにより,追従性能の高い二自由度制御装置を提供する。
【解決手段】 制御対象の状態量を検出して状態量検出値を生成する状態量検出器(106)と,状態量指令値を修正して状態量指令修正値を生成する前置補償器(102)と、前記状態量指令値からフィードフォワード操作量を生成するフィードフォワード制御器(101)と,状態量指令修正値と状態量検出値の差信号からフィードバック操作量を生成するフィードバック制御器(103)と,フィードフォワード操作量とフィードバック操作量との和を操作量指令値とし,操作量を操作量指令値に追従させる操作量制御器とを備えた二自由度制御装置において,前置補償器は可変であり,前置補償器の伝達関数が状態量指令値から状態量検出値までの伝達関数に等しくなるように自動調整する自動調整演算部(107)を備えた。
(もっと読む)
振動低減装置のコントローラの設計方法、振動低減装置のコントローラ及び振動低減装置
【課題】騒音抑制や速応性などに関する制御性能およびロバスト安定性の両面を考慮して複数の周波数帯域の振動の低減をそれぞれ対応して制御する複数のコントローラの設計方法等を提供することにある。
【解決手段】複数のコントローラのうち1つのコントローラについて、1つのコントローラを除く他の1以上のコントローラでフィードバックした状態で1つのコントローラの制御対象からモデル誤差を求め、当該モデル誤差を用いてロバスト安定性を満たす重み関数を求めて1つのコントローラを設計する。これにより、周波数帯域を分割して各帯域のモデルを低次元で同定することができ、モデル化のための計算時間の短縮、モデル化精度の向上を達成することができる。各帯域用コントローラは、それぞれの帯域に対応した低次元モデルから設計されるため、制御系設計の高効率化を図ることができると同時に設計されるコントローラも低次元で構成することができる。
(もっと読む)
振動低減装置
【課題】ディジタルコントローラのナイキスト周波数を超える高周波域の信号についても誤差を生じることなく制御でき、制御対象の振動を低減できる振動低減装置を提供する。
【解決手段】コントローラ101によって制御対象の振動を低減する振動低減装置であって、コントローラのナイキスト周波数の自然数倍の周波数を含まないで、通過帯域幅がナイキスト周波数からサンプリング周波数までの周波数幅以下であり、振動状態検出手段25で検出した振動のうち、その通過帯域の振動を通過させる入力側バンドパスフィルタ104と、その通過したアナログ信号をディジタル信号に変換するAD変換手段102と、そのディジタル信号から決定されたフィードバック信号を、ディジタル信号からアナログ信号に変換するDA変換手段103と、変換されたアナログ信号で制御対象を加振するアクチュエータ10とを備える。
(もっと読む)
サーボ制御装置とその速度追従制御方法
【課題】 ノイズの影響を許容できる範囲に抑え、更に、外乱や負荷変動などの悪影響を抑制し、ロバスト安定性を保証し、指令に対するロバストかつ高性能な追従制御を実現することができるサーボ制御装置を提供する。
【解決手段】 速度指令ω*に基づいてトルク指令基本信号T0*を算出するPI制御部2を備え、電動機および負荷機械を駆動制御するサーボ制御装置において、前記負荷機械のイナーシャが大きい場合と前記負荷機械のイナーシャが小さい場合とを比較して、前記モータ速度の応答をほぼ一致させる手段5,6を備えた。
(もっと読む)
外乱補償判断装置、外乱補償判断方法、記録媒体及びディスクドライブ
【課題】外乱補償判断装置及び方法とそれを利用したディスクドライブを提供すること。
【解決手段】プラントを制御する制御入力信号と制御入力信号に相応するプラントのサーボ出力信号とを入力して、プラントに印加された外乱値を推定する外乱観測器1000と、外乱観測器1000で推定された外乱値の絶対値を一定周期内で累積しつつ、累積された推定外乱の値を初期設定された条件によって評価して外乱補償オン/オフモード転換を決定する外乱評価器270と、外乱補償オン/オフモード転換決定によって、外乱観測器1000で推定された外乱値のフィードバックオン/オフをプラントの制御ループにスイッチングするスイッチング手段280とを備えることを特徴とする外乱補償判断装置を提供する。
(もっと読む)
サーボ制御装置
【課題】周期的に繰り返される目標値や外乱に対する制御誤差を、効果的に低減するサーボ制御装置を提供する。
【解決手段】安定補償回路106を、カットオフ周波数=繰り返し周波数×4の1次ローパスフィルタ201、カットオフ周波数=繰り返し周波数/4の1次ハイパスフィルタ202、ゲイン0.8の減衰器203を直列接続して構成し、安定補償回路106の繰り返し周波数における位相を0とすることにより、繰り返し補償回路102のピークゲイン周波数が、繰り返し周波数に一致させ、周期的に繰り返される目標値や外乱に対する制御誤差を、効果的に低減することを実現する。
(もっと読む)
リミットサイクルを用いた制御対象の動特性推定方法および制御器パラメータの設定方法
【課題】リレー要素を用いたリミットサイクル法により制御対象の動特性を推定する際に、推定パラメータの数を増やすためにリミットサイクルにおける制御対象の入出力信号の基本波と高調波成分を用いると、制御対象の動特性の精度の良い推定が難しいといった問題点があった。
【解決手段】リミットサイクルを発生させる際に、リレー要素の前にローパスフィルタを挿入することにより外乱の影響を抑止するとともに、特性の異なる複数のローパスフィルタに対してそれぞれリミットサイクルテストを行い、それらの際における制御対象の入出力信号の基本波成分を用いて制御対象の動特性を推定することにより、精度の良い推定を可能にする。
(もっと読む)
PID制御装置及びそのPID制御系の制御要素を設定する方法
【課題】PID制御装置において目標サーボ帯域に亘って高速高精度での位置決めを実現する制御要素の決定方法を提供することにある。
【解決手段】PID制御系の制御要素を設定する方法においては、制御対象の周波数応答特性が測定されてこの周波数応答特性に近似させたフィードバック制御系の2次遅れ系の伝達関数が特定される。制御対象を制御する制御器の伝達関数が比例、積分及び微分ゲイン係数を含む不完全微分型に設定され、制御器の伝達関数と前記制御対象との伝達関数の積で表される開ループ伝達関数が定められ、制御対象が有する共振特性を打ち消すように制御器の比例、積分及び微分ゲイン係数が求められ、制御器に設定される。
(もっと読む)
ディジタルサーボ制御装置
【課題】トルクフィードフォワード信号を滑らかにし、モータ動作時の異音を小さくし、制御対象の振動を抑えることができるディジタルサーボ制御装置を提供する。
【解決手段】指令信号あるいは速度フィードフォワード制御器5の出力信号の微分信号に、トルクフィードフォワードゲインTFFを乗じた今回乗算値を保存する遅延器64を有し、前記今回乗算値と1サンプリング前の前回乗算値のいずれか一方に基づいて、トルクフィードフォワード信号を生成するトルクフィードフォワード制御器6を備える。
(もっと読む)
フィルタ装置、及びそれを用いたフィードバック制御装置
【課題】入力信号のうちノイズ等の無用な高周波成分を低減させながら、制御すべき周波数帯域の位相遅れが小さいフィルタ装置、及びそれを用いたフィードバック制御装置を提供することを目的とする。
【解決手段】入力信号の高周波ノイズを低減するフィルタ装置であって、入力信号を位相遅れ処理して位相遅れ信号を出力する一次遅れフィルタ部と、前記入力信号を微分処理して微分信号を出力する微分特性処理部と、前記位相遅れ信号と前記微分信号を加算して出力信号を得る加算処理部とを備えることを特徴とするフィルタ装置、及びそれを用いたフィードバック制御装置。
(もっと読む)
磁力支持天秤装置における低周波域ゲイン倍加制御
【課題】 本発明の課題は、磁力支持天秤装置においてシステムの安定性を損なうことなく、空気力または流体力により加振された模型揺動を小さくする制御手法を開発して提示することにある。
【解決手段】 本発明の制御システムは、磁気力によって物体を空間に支持する装置のフードバック制御系において、センサーで検出した物体の位置情報から高周波成分を除去するローパスフィルターと、該ローパスフィルターの出力を入力する二重位相進み手段と、前記二重位相進み手段の出力信号を目標設定値に対して減算する手段とを備え、既存のフィードバック制御系よりも低周波域の制御性能を向上させるようにした。
(もっと読む)
制御装置
【課題】制御対象の周波数特性の動的な変化の影響を適正に補償して、制御対象の出力の制御を良好に行うことができる制御装置を提供する。
【解決手段】例えば排気系Eを制御対象とする制御ユニット7は、排気系Eの出力を検出するO2センサ6の出力等を用いて排気系Eのモデルのパラメータを同定し、その同定値を用いてO2センサ出力を所定の目標値に収束させるように排気系Eへの入力を規定する操作量を求める。パラメータの同定においては、モデルの出力とO2センサ6の出力との偏差にフィルタリング処理を施したものを最小化するように、パラメータを同定する。フィルタリング処理の周波数に対するゲイン特性は、排気系Eの周波数特性に影響を及ぼす排ガス流量に応じて適宜変更される。
(もっと読む)
1 - 14 / 14
[ Back to top ]