
Fターム[5H115UI23]の内容
車両の電気的な推進・制動 (204,712) | 構造 (3,924) | 設定器 (317) | ブレーキ (114) | ペダル型 (100)
Fターム[5H115UI23]に分類される特許
1 - 20 / 100
車両の動力伝達制御装置
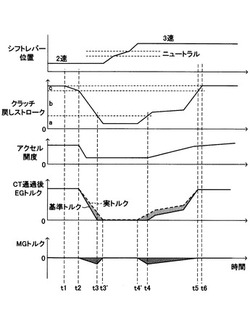
【課題】HV−MT車にて、実際のクラッチトルク特性の変化によってクラッチ操作部材の操作に対する「駆動輪に伝達される駆動トルク」の推移に変化が発生することの抑制。
【解決手段】この動力伝達制御装置は、動力源として内燃機関(EG)とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。クラッチトルク基準特性(マップ)にクラッチ戻しストローク検出値を適用してクラッチトルク基準値が決定される。このクラッチトルク基準値と「EGの出力軸の駆動トルク検出値」とのうちで小さい方の値が「CT通過後基準EGトルク」として決定される。MGトルクは、CT通過後基準EGトルクから、M/Tの入力軸の駆動トルク検出値(CT通過後実EGトルク)を減じた値に調整される。これにより、CT通過後EGトルクの誤差が補償され得る。
(もっと読む)
ハイブリッド車両およびその制御方法

【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両走行のための要求トルクを確保する。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、電力制御トルクを出力する余地を残すように設定されたMG1およびMG2のトルク上下限範囲から、駆動軸32aに発生できる駆動トルクのトルク上下限範囲を定める。そして、HVECU70は、当該トルク上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように、MG1およびMG2のトルク指令値を設定する。
(もっと読む)
ハイブリッド駆動装置
【課題】モード切替時の制御を簡略なものとすることが可能なハイブリッド駆動装置を提供する。
【解決手段】エンジンEに駆動連結される入力部材Iと、第一回転電機MG1と、第二回転電機MG2と、車輪及び第二回転電機MG2に駆動連結される出力部材Oと、それぞれ3つの回転要素を有する第一差動歯車装置D1及び第二差動歯車装置D2と、を備えたハイブリッド駆動装置H。入力部材Iが第一キャリヤCA1及び第二キャリヤCA2に駆動連結され、出力部材Oが第二リングギヤR2に駆動連結され、第一回転電機MG1が第一サンギヤS1に駆動連結され、第一リングギヤR1を選択的に回転停止させるように規制する回転規制装置F2と、第二サンギヤS2に対する第一サンギヤS1の相対回転を正方向にのみ許容するように規制する第一回転方向規制装置F1と、を備える。
(もっと読む)
車両制御装置
【課題】車両総重量や車両重心位置の変化に対応させた適切な車両挙動制御を行うこと。
【解決手段】設定した目標制御量又は/及び目標制御タイミングで車両10の挙動制御を行う車両制御装置において、車両総重量を推定又は検出する重量演算手段1eと、車両重心位置を推定又は検出する重心位置演算手段1dと、車両10の旋回特性を表す旋回特性指数値を車両総重量と車両重心位置に応じて設定する旋回特性指数設定手段1cと、車両の走行状態を表す走行状態量と車両総重量及び車両重心位置に応じた旋回特性指数値とに基づいて車両10が所望の旋回姿勢となる目標制御量又は/及び目標制御タイミングを設定する旋回制御手段1bと、を設けること。
(もっと読む)
車両走行制御装置
【課題】車両の走行を円滑に制御することができる車両走行制御装置の提供。
【解決手段】車両の前輪31、32は、第1モーター21および第2モーター22により駆動される。また、後輪33、34は、第3モーター23により駆動される。第1マイコン71および第2マイコン72は、それぞれ第1インバーター51および第2インバーター52を介して、第1モーター21および第2モーター22を回転制御し、第3マイコン73は、第3インバーター53を介して第3モーター23を回転制御する。前輪31、32のみが駆動されて車両が走行する場合に、第1モーター21または第2モーター22が高回転の制御状態にある時、第1マイコン71または第2マイコン72によって実行される演算の一部を、第3マイコン73により分担して行う。
(もっと読む)
車両制御装置、及び車両制御方法
【課題】運転操作に応じた目標制御量を再構成する際に、この再構成に伴う車両挙動の変化を運転者に認識させる。
【解決手段】運転者の運転操作に応じて目標車両挙動を算出し、算出した目標車両挙動に応じて、複数の制御対象に対する夫々の目標制御量を算出し、算出した目標制御量の夫々に対して限界範囲を算出し、目標制御量のうち、全てが限界範囲内であれば、これら目標制御量に応じて制御対象を制御し、少なくとも一つが限界範囲外であれば、全てが夫々の限界範囲内となる新たな目標制御量を算出し、これら新たな目標制御量に応じて前記制御対象を制御するものであって、新たな目標制御量に応じて制御対象を制御する際に、これら新たな目標制御量によって達成される車両挙動と目標車両挙動との差に応じて、運転操作に対する操作反力を制御する。
(もっと読む)
管理システム
【課題】所定の管理目標時期における車両の劣化状態のバラツキを抑制する。
【解決手段】4台の車両はそれぞれに異なる管理環境下で使用される。走行距離等から各管理環境の劣化進行具合を示す劣化傾向A1〜A4が演算される。劣化傾向A1〜A4の傾きから、劣化傾向A1が最も車両を劣化させ易く、劣化傾向A4が最も車両を劣化させ難いことが判断される。次いで、劣化傾向A1〜A4と直近の劣化値B1〜B4とに基づき、管理目標時期における各車両の劣化予測値C1〜C4が演算される。そして、最も劣化し難い劣化傾向A4の管理環境に、最も大きな劣化予測値C1の車両が新たに割り当てられ、最も劣化し易い劣化傾向A1の管理環境に、最も小さな劣化予測値C4の車両が新たに割り当てられる。また、劣化傾向A2の管理環境には劣化予測値C3の車両が新たに割り当てられ、劣化傾向A3の管理環境には劣化予測値C3の車両が新たに割り当てられる。
(もっと読む)
車両用制動制御装置
【課題】 回生協調制御により回生制動トルクと摩擦制動トルクとをすり替えるときの減速度の変動を抑制できる車両用制動制御装置を提供する。
【解決手段】 統合コントローラ110は、回生協調制御時、回生制動トルク変化量ΔRegが大きいほど、インプットロッドストロークXiの変化量に対するプライマリピストン2bの変化量を減少させるアシスト推力補正手段を備える。
(もっと読む)
ハイブリッド車両の変速制御装置および変速制御方法
【課題】回生制動後に大きなモータトルクでエンジンをクランキングできる新規なハイブリッド車両の変速制御装置および変速制御方法の提供。
【解決手段】ブレーキペダルが操作されたときは、前記モータMGの回生制動時に、当該モータMGによる回生効率が所定値以上になる前記モータMGの回生目標回転数となるように前記変速機ATの変速比を制御する。その後、前記モータMGによるエンジンEのクランキング要求または再加速要求があるときには、当該クランキング時または再加速時に前記モータMGのトルクが所定値以上となる前記モータMGの力行目標回転数となるように前記変速機の変速比を制御する。これによって、回生制動後に大きなトルクでエンジンをクランキングできるため、エンジン始動の遅れを回避して加速不良を防止できる。
(もっと読む)
ハイブリッド車両の動力伝達装置
【課題】駆動源の動力を電動機および出力軸に分配する遊星歯車装置から成る動力分配機構を備えたハイブリッド車両の動力伝達装置において、装置を小型化することができるハイブリッド車両の動力伝達装置を提供する。
【解決手段】動力分配機構16と第1電動機MG1との間の動力伝達経路にダンパ装置38が設けられているため、ダンパ装置38は、エンジン12の駆動トルクTEに対して動力分配機構16を介して第1電動機MG1が受け持つ反力トルクのみを分担することになる。したがって、ダンパ装置38に伝達されるトルクがエンジン12の駆動トルクTEよりも小さくなるので、ダンパ装置38のトルク容量を小さくすることが可能となり、ダンパ装置を小型化することができる。これより、動力伝達装置10全体としても同様に、小型化することができる。
(もっと読む)
電源装置およびその制御方法並びに車両
【課題】二次電池側の電圧に対して機器側の電圧を調整する電圧調整回路のスイッチング素子の劣化を抑制する。
【解決手段】バッテリの充放電電流Ibの大きさが大きいほど昇圧回路のトランジスタの温度の上昇量が大きくなる傾向にあるという昇圧回路の特性を考慮して、バッテリの充放電電流Ibの絶対値が第1電流Ib1以下のときには高周波数CFHを昇圧回路のキャリア周波数CFに設定し、充放電電流Ibの絶対値が第1電流Ib1より大きいときには高周波数CFHより低い中間周波数CFMや低周波数CFLをキャリア周波数CFに設定し、設定したキャリア周波数CFを用いて昇圧回路をスイッチング制御する。これにより、昇圧回路のトランジスタの温度に拘わらずトランジスタに大きな熱応力が繰り返し作用するのが抑制され、昇圧回路のトランジスタの劣化を抑制することができる。
(もっと読む)
ハイブリッド車両の走行支援装置及びハイブリッド車両の走行支援方法
【課題】制動制御中に変速制御される際にも好ましい回生量を得ること。
【解決手段】変速機構70並びに車両制動装置としての制動力発生手段91fl等及び回生制動装置を備え、生成した将来の走行パターンに基づき走行可能なハイブリッド車両1の走行支援装置において、制動開始時間、制動開始時の車速、制動終了時の目標車速及び制動開始から制動終了までの目標車両減速度に基づいて基準制動パターンを生成する基準制動パターン生成手段と、基準制動パターンでの制動中に変速制御されるならば基準制動パターンにおける制動終了時間の変更可否を判定する基準制動条件変更可否判定手段と、制動終了時間の変更が可能ならば基準制動パターンに比べて回生量を増やす回生制動パターンを生成する回生制動パターン生成手段と、回生制動パターンが生成されたならば当該回生制動パターンで制動制御を実行させる車両制動制御手段と、を統合ECU156に設けること。
(もっと読む)
車両用駆動制御装置
【課題】前輪のスリップを適切に判定し、適切に四輪駆動走行を行うことである。
【解決手段】車両用駆動制御装置は、車両重量及び車両に外部から作用する力のうちの少なくとも一方を検出するロールバック判定部51及び走行抵抗値設定部52と、検出した車両重量及び車両に外部から作用する力のうちの少なくとも一方を基に、車両速度推定手段が推定する車両速度を補正する推定車速補正部53とを備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 EVモードからHEVモードに移行する際、クランキングトルクおよび車両の駆動トルクの双方を賄うことが可能なハイブリッド車両の制御装置を提供する。
【解決手段】 エンジンおよびモータのトルクを用いて走行するエンジン使用走行モード実行時にエンジンを停止させる際、エンジンの回転数が所定回転数以下になってから、締結要素を解放するエンジン停止制御手段を設けた。
(もっと読む)
省エネルギ運転の評価装置及び省エネルギ運転の評価方法
【課題】運転者が省エネルギ運転の度合いをより適切に把握することが可能な省エネルギ運転の評価装置及び省エネルギ運転の評価方法を提供する。
【解決手段】所定期間におけるエンジンによる燃料の消費量及びバッテリの充放電量を算出する。そして、算出した燃料消費量及び充放電量に基づいて省エネルギ運転の度合いの評価値を設定し、この評価値に応じた情報を報知する。この際、燃料消費量が少ないほど、かつ、充放電量が多いほど、省エネルギ運転の度合の評価値を高く設定する。
(もっと読む)
電動車両用自動変速機の回生制動時変速制御装置
【課題】回生制動走行への移行時に直ちに自動変速機がダウンシフトを開始する違和感を解消した電動車両用自動変速機の変速制御装置を提供する。
【解決手段】自動変速機は通常、実線で示すアップシフト線、破線で示すダウンシフト線を基に、車速VSPおよびアクセル開度APOから、現在の運転状態に好適な目標変速段(第1速〜第4速)を求め、この目標変速段が選択されるよう変速摩擦要素の締結・解放の組み合わせを決定する。回生制動走行への移行時における自動変速機のダウンシフトに際しては、破線で示すダウンシフト用のノーマル変速線よりも高車速側におけるコースト変速線α1,α2,α3,α4を選択し、ノーマル変速線に代えてこのコースト変速線に基づき自動変速機のダウンシフトを行う。よって、回生制動走行への移行時における自動変速機のダウンシフトが、当該移行後の車速低下に伴って生起されることとなり、このダウンシフトが当該移行と同時に開始される違和感を解消し得る。
(もっと読む)
ハイブリッド車両の制御装置
【課題】違和感なくエンジンを始動可能なハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンの始動開始から始動完了までの始動時間を検出し、次回のエンジン始動要求がなされたときは、始動時間に応じて締結要素に対する伝達トルク容量指令を補正することとした。
(もっと読む)
電動機の制御装置及びこれを搭載する車両並びに電動機の過熱の報知方法
【課題】電動機の負荷率に応じて電動機が過熱に至る報知をより適正に行なう
【解決手段】要求負荷率Pm*が大きいときにはモータ温度Tmが比較的低い温度でも過熱に至ると判定すると共に要求負荷率Pm*が小さいときにはモータ温度Tmが比較的高い温度でも過熱に至らないと判定するモータ過熱警告判定用マップに対して要求負荷率Pm*とモータ温度Tmとが過熱警告範囲に属するか否かを判定し(S160,S170)、過熱警告範囲に属するときに過熱警告ランプを点灯する(S190)。これにより、要求負荷率Pm*に応じたモータ温度Tmを用いてモータが過熱に至ることを報知する過熱警告ランプを点灯することができる。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】システム起動後の電動走行中に一時的にハイブリッド走行した後にバッテリの残容量(SOC)が低下したことにより電動走行からハイブリッド走行する際の浄化触媒の暖機を不要にし、燃費の向上とエミッションの悪化を抑制する。
【解決手段】システム起動後のモータ走行の最中に要求パワーPe*が閾値Pstartに至ると、バッテリのSOCに基づいてSOCが閾値Shvに至るまでモータ走行が可能なモータ走行推定時間Tmdと外気温Toutとに基づいてモータ走行推定時間Tmdだけモータ走行をしたときに浄化装置の触媒の温度が触媒が活性化する下限温度となるエンジンの運転継続必要時間Tedを設定し(S200〜S220)、要求パワーPe*が閾値Pstopに至ってもエンジンを始動してから運転継続必要時間Tedが経過するまではエンジンの運転を継続する(S230,S240)。
(もっと読む)
車載用蓄電装置
【課題】二次電池の正極側および負極側の接続を共に遮断できる構成で部品点数を低減できる構成を提案する。
【解決手段】バッテリ32とインバータ24とを接続する正極側電力ライン38aにシステムメインリレー34を設け、バッテリ32とインバータ24とを接続する負極側電力ライン38bにサービスプラグ36を設ける。これにより、バッテリ32とインバータ24との正極側および負極側の接続を共に遮断することができる構成で部品点数を低減することができる。この結果、故障の発生率を抑制したり装置を小型化することができる。
(もっと読む)
1 - 20 / 100
[ Back to top ]