
Fターム[5H161AA07]の内容
鉄道交通の監視、制御、保安 (8,492) | 列車等の種類 (1,571) | 無人車 (5) | 無人搬送車 (4)
Fターム[5H161AA07]に分類される特許
1 - 4 / 4
車両の特徴点の通過検知を用いた移動車両の地上制御装置および地上制御方法
【課題】 精密な速度制御は必要としないが、目標点に対しスムーズな減速と、ほどほどの停止精度の確保が行えるシンプルな、移動体の速度制御システムを提供する
【解決手段】移動体中の特徴点(車輪等)の位置や、各特徴点が通過センサ通過後に移動体に指示すべき速度データを、各移動体の各特徴点と各通過センサに対応して、予め地上制御部に登録しておく。その後移動体中の特徴点がセンサを通過する毎に、予め登録してある、対応する特徴点と通過センサに対する、速度指令データを読み出し、地上制御部から移動体に速度コマンドを送信することにより、正確な位置情報に基づく多数回の速度変更を行う。
(もっと読む)
搬送台車システム

【課題】 1つのコントローラの管理下に複数の通信回線エリアが存在する場合において、当該コントローラによって台車を正確に把握することができるようにした搬送台車システムを提供する。
【解決手段】
1つのコントローラ8の管理下に複数の通信回線エリア11a、11b、11cが存在する搬送台車システム1であって、台車5に通信回線11の切り換わり位置12の手前でコントローラ8に渡り要求を送信する手段Tを設け、コントローラ8に、台車5からの渡り要求により、旧エリアでの該当台車5への通信を中止するとともに、新エリアでの該当台車5への通信を開始する手段Rを設けたことを特徴とする。
(もっと読む)
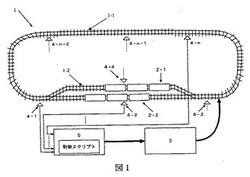
物品搬送設備
【課題】 構成の複雑化を招くことなく、デッドロック状態を極力早く回避すること。
【解決手段】 管理部5は、複数の移動経路1のすべてから複数の移動体2が交差点D2に向けて同時に進入する場合には、退避対象の移動体2aに対して、退避用運行指令情報T1を移動制御手段4に指令し、かつ、退避対象の移動体2a以外の移動体2に対して、停止用運行指令情報T2を移動制御手段4に指令し、次に、退避対象の移動体2a以外の移動体2の一つに対して、指定通過用運行指令情報T3を移動制御手段4に指令する形態で、退避対象の移動体2a以外の移動体2に対して、通過用運行指令情報を移動制御手段4に順次指令し、その後、退避対象の移動体2aに対して、復帰通過用運行指令情報を移動制御手段4に指令するように構成されている。
(もっと読む)
搬送システム
【課題】 高周波電源設備の電力供給能力を有効に活用することができる搬送システムを提供する。
【解決手段】 上位コントローラ6からの運行指令により、運行制御装置5は、搬送車の昇降動作を指示する際に、記憶部53に記憶してある換算情報(532)に基づいて、各搬送車で消費する消費電力の合計を合計搬送車換算値として算出し、算出した合計搬送車換算値と許容電力に対応する許容換算値とを比較する。合計搬送車換算値が許容換算値よりも小さい場合には、運行制御装置5は、搬送車へ昇行指示する。合計搬送車換算値が許容換算値よりも小さくない場合には、運行制御装置5は、搬送車へ昇行指示を行わない。
(もっと読む)
1 - 4 / 4
[ Back to top ]