
Fターム[5H180CC23]の内容
Fターム[5H180CC23]に分類される特許
21 - 22 / 22
周回走行事前検出装置および周回走行事前検出プログラム
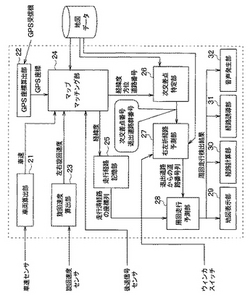
【課題】 従来よりも迅速に周回走行を事前検出し、その検出に基づいてドライバーの目的地捜索の支援を行う。
【解決手段】 カーナビゲーション装置において、次交差点特定部26が、ウインカ操作における自車両の位置および地図データに基づいて、ウインカ操作があった時点の次の交差点を特定し、右左折経路予測部27が、特定された次の交差点を当該ウインカ操作の方向に曲折した先の道路から道なりに続く道路を、当該車両の曲折後の経路として予測し、周回走行予測部28が、走行経路記録手段が前記記憶媒体に記録した過去の走行経路と交差することを判定し、地図表示部29、経路計算部30、経路誘導部31、および音声発生部32が、その周回走行予測部28の判定に基づいて、目的地捜索を支援するための表示制御を行う。
(もっと読む)
移動体検出システム

【課題】送信すべき情報に基づく電界を電界伝達媒体に誘起させるとともに電界伝達媒体に誘起された電界を検出して情報の送受信を行うトランシーバを利用することにより、移動体の位置を正確に検出することができる移動体検出システムを提供する。
【解決手段】移動体検出システム100は、複数の発信装置110i(i=a,…,n)、検出装置120、及び観測装置130を備えており、自動車の移動方向に対して複数の発信装置110i及び検出装置120を適宜間隔をおいて路面に設置し、該路面上を通過する自動車を検出して、該自動車の長さを測定するコンピュータシステムである。これは、トランシーバ9を用いることにより、自動車10のタイヤが路面上の発信装置110i及び検出装置120の電極に同時に接しているときは、発信装置110iと検出装置120間の自動車10を介した通信路が成立することによるものである。
(もっと読む)
21 - 22 / 22
[ Back to top ]