
Fターム[5H219AA07]の内容
Fターム[5H219AA07]の下位に属するFターム
工作機械、マニピュレータ、産業用ロボット (5)
溶接機
Fターム[5H219AA07]に分類される特許
1 - 2 / 2
電子カムコントローラ
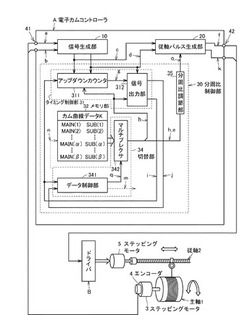
【課題】 サーボモータ等を使用することなく従軸制御の位置決め精度の向上を図る。
【解決手段】 エンコーダ3の主軸パルスa,bに基づいてクロック信号c等を生成する信号生成部10と、クロック信号cを方向信号dが示す方向に計数して分周比可変可能に分周して従軸パルスfとして出力する従軸パルス生成部20と、クロック信号c及び方向信号dに基づき従軸パルス生成部20の分周比を制御する分周比制御部30とを備える。分周比制御部30は、メモリ部32に予め記録されたカム曲線データKに含まれる主軸移動量と従軸移動量との比率に基づき従軸パルス生成部20の分周比を制御している。
(もっと読む)
計装制御方法および計装制御システム

【課題】 製造プラントの計装制御システムにおいて、プラント設備の入替えや追加等の改変を、簡単かつ安価に行えるようにする。
【解決手段】 複数の設備2の各々が独自に自己の状態情報STを、状態情報出力部12により、常時共通データベース11に書き込んで記録しておき、上記の改変に際し、その各々が独自に、接続順序情報COに従って、接続されているべき相手方設備を自ら特定すると共に、その相手方設備の上記状態情報STを、状態情報取得部13により、共通データベース11から読出す。そして自己と相手方との接続が正常であることをそれぞれが独自に確認したときに、材料の受入れおよび払出しを完了するようにする。
(もっと読む)
1 - 2 / 2
[ Back to top ]