
Fターム[5H301BB15]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 用途、移動体の種類 (1,798) | 玩具 (10)
Fターム[5H301BB15]に分類される特許
1 - 10 / 10
ロボットシステム
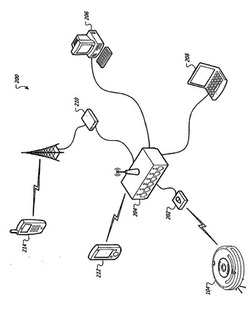
【課題】ネットワークデータブリッジおよび移動式ロボットを備えるロボットシステムが提供される。
【解決手段】ネットワークデータブリッジ202は、インターネットプロトコルネットワークに接続可能な広帯域ネットワークインターフェイスと、無線コマンドプロトコルネットワークに接続可能な無線コマンドインターフェイスと、広帯域ネットワークインターフェイス経由で受信するシリアルコマンドを抽出し、無線コマンドインターフェイス経由でブロードキャストするデータブリッジ構成要素と、を備える。また、移動式ロボット104は、ロボットを動かす駆動システムと、ネットワークデータブリッジから送信されるシリアルコマンドを受信する無線コマンド通信構成要素と、を備える。さらに、ネットワークデータブリッジは、製造者サーバおよび移動式ロボット間の通信のため、広帯域ネットワークインターフェイスを介して製造者サーバに接続可能である。
(もっと読む)
コントローラ、模型装置、およびコントロール方法

【課題】模型装置がユーザの意図しないエリア内へと移動してしまう可能性を低減する。
【解決手段】コントローラ100は、模型装置から模型装置の現在位置を受信するための通信インターフェイス170と、模型装置の移動許可エリアの指定を受け付けるための入力部132,150と、模型装置を移動させるための命令を受け付けて、模型装置の位置に基づいて命令によって模型装置が移動許可エリアから出るか否かを判断し、模型装置が移動許可エリアから出ない場合に通信インターフェイスを介して命令を模型装置に送信し、模型装置が移動許可エリアから出る場合に模型装置に命令を送信しないプロセッサ110とを備える。
(もっと読む)
ネットワークシステム、コントロール方法、コントローラ、およびコントロールプログラム
【課題】コントローラからの指令に基づいて移動する模型装置を利用した新たなネットワークシステムを提供する。
【解決手段】コントローラ100は、模型装置を移動させるための指令を受け付け、指令を模型装置へ送信する。模型装置200は、コントローラからの指令に基づいて模型装置を移動させ、模型装置の前方を撮影し、模型装置の位置を取得し、模型装置の向きを取得し、撮影画像と位置と向きとをコントローラに送信する。コントローラは、模型装置から受信した位置と向きとに基づいて、模型装置用のコースのデータから表示用のバーチャル画像を作成し、模型装置から受信した撮影画像とバーチャル画像とを合成した画像をディスプレイ130に表示させる。
(もっと読む)
倒立振子型車両の制御装置
【課題】移動動作部(車輪体)とクラッチとを連動することで操作性を向上させ、また、クラッチの動作状況(操作状態)に応じて適切な姿勢制御を行うことができる、倒立振子型車両の制御装置を提供する。
【解決手段】倒立振子型車両1Aは、右側の電動モータ31Rに繋がるクラッチ32Rと、左側の電動モータ31Lに繋がるクラッチ32Lとを備えている。そして、例えば、電動モータ31Lに特定の状態が発生した場合は、電動モータ31Lのクラッチ32Lが開放される。この場合、倒立振子型車両1Aは、電動モータ31Rにより、特定の一方向(乗員から見て斜め方向)にのみ移動ができるようになる。そして、倒立振子型車両1Aがこの一方向へ移動する場合に、制御ユニット50Aは、一方向姿勢演算部を選択し、この特定の一方向に対する姿勢制御演算により適切な姿勢制御を行う。
(もっと読む)
リモートコントロール装置
【課題】ジョイスチックでコントロールするリモートコントロール走行体の走行に関して、操縦器と走行体の位置関係による角度誤差を少なくすること、制御可能な角度範囲をひろげる。
【解決手段】操縦器1から見た走行体2の位置の方位γと、操縦器1から見た走行体2の向きβ、操縦器1の操縦による目標角αを得て、これらのデータα、β、γを演算した値で走行体2の向き変更駆動手段を駆動する。それによってすべての位置関係で正確な制御ができるようになる。
(もっと読む)
誘導装置
【課題】生物の認知地図のメカニズムを模倣して、移動体を誘導する誘導装置を提供する。
【解決手段】進行方向及び速度を含む移動指示に基づいて移動する移動体を誘導する誘導装置であって、移動体の周囲の地形特徴を検知する画像認識部101と、移動目標となる地形特徴の選択を受け付ける移動目標セレクタ15と、移動目標が選択されていない時に進行方向及び速度を時間経過に応じて変化させて移動指示を出力する固有移動指示部103と、移動目標が選択されていない時に移動指示の時間変化の履歴と移動中に検知された画像認識部101の検知結果とを関連付けて認知記憶情報として記録する空間−時間情報生成部111と、移動目標が選択されている時に認知記憶情報に基づいて、移動体を移動目標へ誘導する移動指示を出力する誘導移動指示部113とを備える。
(もっと読む)
移動体遠隔操作システム及び移動体遠隔操作プログラム
【課題】容易且つ円滑に操作することができ、操作性の向上を図る。
【解決手段】本発明は、操作体1により移動体2の動作を遠隔操作する移動体遠隔操作システムであって、移動体2の移動方向を入力する入力部11と、移動体2の方位を検出する移動体方位検出部17と、移動体2を移動させる駆動部21と、操作体1の方位を検出する操作体方位検出部9とを備え、操作体方位検出部9により検出された操作体1の方位に関する情報と入力部11により入力された移動体2の移動方向に関する情報とにより移動体2の移動目標方位を算出し、該移動目標方位に関する情報と移動体方位検出部17が検出した移動体2の方位に関する情報とにより方位誤差を算出し、該方位誤差から駆動部21の動作量を算出することを特徴とする。
(もっと読む)
移動物体操縦装置および方法
【課題】移動物体の操縦を直感的な体系により操作可能とする。
【解決手段】操縦者の操作に応じて姿勢が変化するコントローラ3で生じた傾きを傾きセンサ11により検出し、演算処理部12により、この傾きから算出したコントローラ3の姿勢変化量に基づき、移動物体9の移動方向および移動速度を含む操作量を算出する。
(もっと読む)
命令入力装置及び命令入力方法
【課題】本発明は、簡易な入力操作で入力命令を入力させる。
【解決手段】本発明は、楕円体状筐体2が押されて移動したとき、当該楕円体状筐体2の移動距離を検出し、当該検出した移動距離に応じて入力命令の入力の有無を判別するようにして、かかる入力命令が入力されたと判別すると、当該入力された入力命令に応じた処理を実行することにより、入力命令を入力するために楕円体状筐体2を持ち上げさせた状態で振り動かすような煩雑な入力操作を何ら行わせることなく、当該楕円体状筐体2を押させて移動させるだけで入力命令を入力させることができ、かくして簡易な操作で入力命令を入力させることができる。
(もっと読む)
位置把握、追跡および分離のためのオーディオビデオセンサー融合装置および融合方法
【課題】 オーディオおよびビデオセンサーを融合して、複数の音源として存在する特定物体の正確な位置および方向を把握して追跡し、この音源を分離する装置および方法を提供する
【解決手段】 異なる方向から受信した複数のサウンドが追跡する物体のものである尤度を表す音声尤度を求める音声尤度モジュールと、映像内の異なる方向に配置する複数のイメージが追跡する物体である尤度を表す映像尤度を決定する映像尤度モジュールと、音声尤度と映像尤度とが一致するかどうかを判断し、音声尤度と映像尤度とが一致すると判断すれば、音声尤度および映像尤度の決定した対を使用して、物体を認識して追跡し、一致しなければ、前記音源またはイメージ源には追跡する物体が存在しないと判断する、認識および追跡モジュールとを備えることを特徴とする装置。
(もっと読む)
1 - 10 / 10
[ Back to top ]