
Fターム[5H301HH20]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の操舵態様 (687) | 方向転換時の操舵 (99) | 前進、後進を繰り返すもの (13)
Fターム[5H301HH20]に分類される特許
1 - 13 / 13
搬送車システム
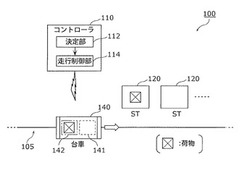
【課題】効率的な搬送作業を実現するための搬送車システムを提供すること。
【解決手段】複数のステーション120に沿って設けられた経路105と、経路105に沿って走行する台車140と、台車140の制御を行うコントローラ110とを備える搬送車システム100であって、台車140は、走行方向に並べて配置された第一載置台141と第二載置台142とを有し、方向転換することで、第一載置台141および第二載置台142のいずれをも走行方向における前方とすることが可能であり、コントローラ110は、荷物の移載作業の内容と荷物の載置状況とを用いて、第一載置台141および第二載置台142のいずれを前方にすべきかを決定する決定部112と、台車140の走行を制御することで、台車140を、決定された第一載置台141または第二載置台142が前方である状態で、目的ステーションに到着させる走行制御部114とを有する。
(もっと読む)
無人搬送車の前後進モード切替制御装置及び前後進モード切替制御方法

【課題】前進モードのときと後進モードのときとで停止位置を一致させることができる無人搬送車の前後進モード切替制御装置及び前後進モード切替制御方法を提供する。
【解決手段】床面に敷設された軌道を検出する軌道検出センサをそれぞれ備える複数の駆動ユニットを有し、前進後進可能な無人搬送車の前後進モードの切替を制御する装置であって、複数の駆動ユニットにそれぞれ設けられたマーカ検出センサでコマンドマーカを検出したら、前後進モードの切替指令であるか否かを判定するモード切替判定手段(ステップS1)と、前後進モードの切替指令があったら、進行方向側の駆動ユニットのマーカ検出センサをアクティブ状態にし、反対側の駆動ユニットのマーカ検出センサを休止状態にするアクティブセンサ切替手段(ステップS2)と、を有する。
(もっと読む)
自律走行装置およびプログラム
【課題】方向転換を精度良く行い、未通過領域の発生を抑え、移動領域の全てを隈無く移動することを可能にした自律走行装置を提供する。
【解決手段】装置本体1と、障害物の有無または距離を検知する障害物検知手段2と、装置本体1の移動方向を検知する方向検知手段3と、装置本体1を移動走行させる走行手段7と、前記各手段の出力を受けて走行手段7を制御する制御手段5とを有し、制御手段5は方向検知手段3の出力補正モードを有するものである。これによって、壁などの移動領域内の物を利用し装置本体1の動作時に方向検知手段3の出力の補正ができ、方向転換を精度良く行い、未通過領域の発生を抑え、移動領域の全てを隈無く移動することを可能にした。
(もっと読む)
自律走行装置およびこの装置を機能させるためのプログラム
【課題】複数の障害物が乱雑に置かれているような場所において、同じ場所で反転往復移動を繰り返し特定の場所から抜け出すことができなくなった場合を改善する自律走行装置を提供する。
【解決手段】障害物の有無または距離を検知する障害物検知手段2と、本体1を移動走行させる走行手段7と、障害物検知手段2からの障害物情報により走行手段7を制御して本体の進行方向を変更する制御手段5とを備え、制御手段5は、移動領域内を往復移動させる往復移動モードを有し、この往復移動モード中に、移動領域内に置かれた障害物によって移動不能状態になったと判断すると、移動不能領域から抜け出る障害物回避動作モードに変更することで、繰り返し動作で往復移動が進行せず、また終了しないことを改善する。
(もっと読む)
自律走行装置
【課題】走行装置本体の部屋座標を正確に計測できない場合でも無駄な走行をすることなく確実かつ精度よく走行を終了できる自律走行装置を提供することを目的とする。
【解決手段】走行装置本体9が走行する部屋の情報を記憶する部屋情報記憶手段1と、部屋情報から基本往復回数を出力する往復回数計算手段2と、基本往復回数から基本走行時間を計算する走行時間計算手段3と、走行装置本体の計測走行時間を出力する走行時間計測手段4と、基本走行時間と計測走行時間から走行工程が終了を判断する走行工程終了判断手段5と、走行工程を終了する往復走行工程終了手段6とを備えたものである。これによって、部屋の情報に応じた基本走行時間を決定し、その走行時間に到達したときに、走行装置本体9の走行終了と判断するものである。したがって、走行装置本体9の部屋座標を正確に計測できない場合でも無駄な走行をすることなく確実かつ精度よく走行を終了できる。
(もっと読む)
農用作業車
【課題】自律的に直進走行する農用作業車において、次工程への遷移時に走行経路の位置決めが容易にでき、かつ、目標経路と実際の走行経路を略一致させることができる技術を提供する。
【解決手段】GPSユニット102と処理部110を備え、GPSユニット102により計測される位置情報に基づいて処理部110によりティーチング経路を生成し、該ティーチング経路に沿って自律走行させるようにした田植機1において、ティーチング開始点(点A)とティーチング終了点(点B)をGPSユニット102により計測し、処理部110により、点Aと点Bを結ぶ直線状のティーチング経路(線分AB)を生成し、かつ、線分ABと、車体に装着した植付部4において設定する作業幅(即ち、植付幅aに植付条数bを乗じた距離)を基準として、線分ABに対して平行で、作業幅だけ離間したN本の直線状の目標経路を生成する。
(もっと読む)
自走式機器およびそのプログラム
【課題】マップ情報の精度が低い場合や誤差にあまり影響を受けずに、広い走行空間であっても少ない計算量でくまなく走行することができる自走式機器を提供する。
【解決手段】機器本体100の移動手段103と、走行のコントロール手段101aと、電池105と、障害物検出手段102と、機器本体が到達していない領域を検出する未到達領域検出手段101bとを備え、障害物検出手段102の情報を利用して走行しながら、未到達領域検出手段101bによって走行位置付近の移動可能な未到達領域を検出し、未到達領域まで移動して機器本体の移動可能な空間をくまなく走行する。これによって、例えば、地図に誤差が含まれていた場合でもあまり影響を受けずに、また、例えば、広い空間であっても走行位置付近の移動可能な未到達領域のみを検索するために、少ない計算量で、機器本体の移動可能な空間をくまなく走行可能である。
(もっと読む)
雪降ロボット
【課題】普通の建物の屋根で、簡単かつ容易に、しかも便利に能率よく使用して安全に雪降ろしする。
【解決手段】雪降ロボットは、建物70の屋根71を自走する雪降ロボットであって、自走して屋根71から雪降ろしする範囲を検出する位置センサ6を備えており、この位置センサ6で屋根71の雪降ろし位置を検出しながら、特定された範囲に自走して屋根71から雪降ろしする。
【効果】建物の屋根の上を無人で走行して、自動的に雪を処理するので、従来では危険が伴った屋根の雪降ろし作業を、高齢者や弱者であっても安全かつ効率よく行うことができる。さらに、降雪時や夜等の作業環境が悪い時でも、屋内に居ながらにして雪降ロボットを運転させて雪降ろしできる。
(もっと読む)
安全管理装置
【課題】簡易かつ安価な設備により、入坑者の安全性を確保することを可能とした、走行台車の安全管理装置を提案する。
【解決手段】坑内への入坑者Pが携帯する発信機3と、走行台車Cに取り付けられて、走行台車Cの進行方向前方であって20m以内にいる入坑者P1を検知し作動するパッシブセンサ1と、走行台車Cに取り付けられて、走行台車Cの周囲であって半径10m以内にいる入坑者P2が携帯する発信機3から発信された信号3aを受信して作動する受信機2と、走行台車Cの運転席に取り付けられて、パッシブセンサ1が作動することにより点灯する第一の警告灯と、受信機2が作動することにより点灯する第二の警告灯とを備えた安全管理装置。
(もっと読む)
荷役システム
【課題】荷保管エリアに進入して荷役作業を行うのに、スムーズに作業を行うことが可能な荷役システムを提供する。
【解決手段】 荷役システム1によれば、オペレータが荷役車両5のフットペダル20を踏み込んだ状態で、操舵輪12の操舵角度を認識し、操舵輪12の向きが直線走行路6に合致するように、操舵輪12を旋回させる。この後、オペレータがアクセラレータ22を操作して、荷役車両5を発進させると、荷役車両5は、直線走行路6を真っ直ぐに自律走行する。従って、再発進した直後の荷役車両5が、従来のように蛇行することがなく、荷役車両5が物品収納棚2に衝突するという不具合は起こらない。
(もっと読む)
押され感知機能を有する移動ロボットとその制御方法
【課題】移動ロボット上端からの押されを感知し、それによって移動ロボットの駆動を制御して障害物から回避させたり、使用者に通報する押され感知機能を有する移動ロボットに関する。
【解決手段】移動ロボット上端の押されを感知する押され感知部160と、上記押され感知部の感知信号によって、移動ロボットの駆動を制御して押されの加えられる該当地域から移動ロボットを脱するようにしたり、押されを使用者に音声通報するように制御するマイクロプロセッサー150と、を含んで構成される。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】 各掃除領域の形状に応じて掃除走行パターンを可変的に適用することにより、掃除領域カバー率を向上させること。
【解決手段】 上記の目的を達成するための本発明によるロボット掃除機は、走行駆動ユニットと、掃除面の領域を検出する掃除領域検出ユニット、及び掃除領域検出ユニットを介して検出した情報に基づいて各掃除領域の形状に対応する螺旋形掃除走行パターンを算出し、走行駆動ユニットに算出した掃除走行パターンに対応する掃除走行信号を出力する中央処理ユニットと、を含む。
(もっと読む)
自律走行移動体
【課題】 走行空間内の壁際や隅についても探索走行ができ、自律走行移動体を用いて作業を行うことができるとともに、走行空間内を探索移動するために必要な検知手段や検出手段の数をできるだけ減らし、小型化することが可能な自律走行移動体を提供することである。
【解決手段】 自律走行移動体1は、移動体本体10と、移動体本体10を走行させる駆動輪12と駆動モータ14と、駆動モータ14を制御する制御部20と、移動体本体10を走行させるための走行情報が入力され、かつ、入力された走行情報に基づいて駆動モータ14を制御するための制御情報を制御部20に与える操作ユニット50とを備える。
(もっと読む)
1 - 13 / 13
[ Back to top ]