
Fターム[5H303LL05]の内容
位置、方向の制御 (6,897) | 制御部、演算部の構成手段 (255) | 単一手段で複数軸を制御するもの (24)
Fターム[5H303LL05]の下位に属するFターム
計算機であるもの (19)
Fターム[5H303LL05]に分類される特許
1 - 5 / 5
追尾装置
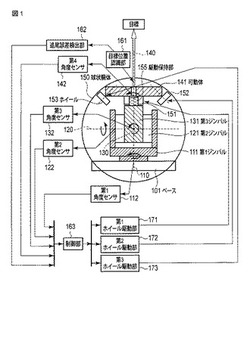
【課題】大きな角速度を必要とせず、全天に渡り目標の自動追尾を可能とする。
【解決手段】追尾装置は、球状胴体と、第1から第3ジンバルと、可動体と、球体駆動部と、駆動保持部と、目標位置認識部と、第1から第4角度センサと、回転バネ駆動部と、制御部と、を備えている。駆動保持部は、第3ジンバルと可動体とを接続し、球体駆動部を球状胴体に押圧した状態に保持する。目標位置認識部は、可動体に支持され、目標の位置データを出力する。第1から第3角度センサはそれぞれ、第1から第3ジンバルの第1から第3回転角度を検出する。第4角度センサは、第3ジンバルに対する可動体の第4回転角度を検出する。回転バネ駆動部は、第3ジンバルを回転中心に戻す。制御部は、位置データ、及び第1回転角度から第4回転角度までを使用して、目標を追尾するように球体駆動部を制御する。
(もっと読む)
モータ制御装置と制御定数調整方法

【課題】多軸サーボシステムにおいて、加減速動作時においても、所望の軸の応答を規範モデル部と同等にすることができるモータ制御装置を提供する。
【解決手段】速度指令とモータ速度の速度偏差からトルク指令を生成する速度制御部(102)とトルク指令に基づいてモータを駆動する電流制御部(103)とを備えた複数のモータ制御部(10)と、外部装置と内部の入出力処理を行なう入出力処理部(13)と、を備えたモータ制御装置において、速度指令とモデル速度のモデル速度偏差からモデルトルク指令を生成する速度制御モデル部と前記電流制御部の応答を模擬する電流制御モデル部とモデル速度を生成する積分器とを備える規範モデル部(11)と、モデルトルク指令の絶対値の積分値とモータ制御部から選んだ少なくとも一つのトルク指令の絶対値の積分値から速度制御部の制御定数を調整する制御定数調整部(12)と、を備えた。
(もっと読む)
ステージ
【課題】 ブリッジ部材の等速運動時のヨーイング角を抑制する姿勢フィードバック制御手段を利用して、機械的な共振に起因する振動を抑制する機能を備えたステージを実現する。
【解決手段】 所定距離を隔てて平行に配置されたマスタ軸リニアモータ及びスレーブ軸リニアモータと、これらリニアモータの軸方向にスライドして位置制御されるマスタスライダ及びスレーブスライダと、これらスライダ間を結合し前記軸方向と同一軸方向に移動制御されるブリッジ部材と、このブリッジ部材の高さ方向の軸に対する回転角を検出してこれを抑制する姿勢フィードバック制御手段と、を有するステージにおいて、
前記ブリッジ部材上の前記マスタスライダ及びスレーブスライダとの結合部近傍に取り付けられた一対の加速度センサと、
これら一対の加速度センサの検出値の差分値を積算して算出された角度信号を入力する角度フィードバック手段と、
を備える。
(もっと読む)
電動機制御装置及びそれを用いた搬送システム
【課題】寸法精度を保持したり寸法的な余裕を付与しなくても必要な位置精度が得られるようにした搬送システムとそれを可能にした電動機駆動制御装置を提供すること。
【解決手段】マッピングセンサ4をウエハ7の積載方向に移動させるマッピング装置5と、その電動機2を制御する電動機制御部15を備え、電動機制御部15は予めその内部に持っているラック8の基準位置と、実際にマッピングセンサ4により測定したラック8の基準位置の偏差量を演算し、搬送ロボットによるウエハ7の搬出と搬入に対するティーチングデータの補正が与えられるようにしたもの。
(もっと読む)
サーボ制御装置
【課題】製造コストが低く、小型であり、かつ、制御対象の制御周期が従来よりも短いサーボ制御装置を提供する。
【解決手段】サーボ制御装置50は、制御対象を駆動させるため駆動部20へ駆動電流を供給する電流供給部15と、少なくとも駆動電流値を検出する検出部17と、制御対象を所望の位置へ移動させるために駆動部20の駆動速度を制御する駆動電流を定めた電流指令を入力し、検出部17からフィードバックされた駆動電流値を入力し、駆動電流値に基づいて電流指令をディジタルロジック方式により補正して補正後の該電流指令を電流供給部15へ出力する論理演算部51とを備えている。
(もっと読む)
1 - 5 / 5
[ Back to top ]