
Fターム[5H303LL06]の内容
位置、方向の制御 (6,897) | 制御部、演算部の構成手段 (255) | 単一手段で複数軸を制御するもの (24) | 計算機であるもの (19)
Fターム[5H303LL06]に分類される特許
1 - 19 / 19
制御指令値生成プログラム、制御指令値生成方法および制御指令値生成装置
【課題】 一の入力指令値から複数の制御指令値を高精度かつ安定的に生成するとともにその際の演算負荷を低減することができる制御指令値生成プログラム、制御指令値生成方法および制御指令値生成装置を提供する。
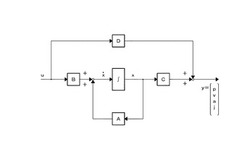
【解決手段】 コンピュータを、所定の入力指令値から当該入力指令値のn階までの微分(n≧0)で表せるn+1個の制御指令値を、入力数が1であり出力数がn+1である状態方程式を用いて生成するn次のデジタルフィルタとして機能させる。
(もっと読む)
同期制御装置

【課題】容易かつ遅れなしにカム曲線の切替が可能な同期制御装置を提供する。
【解決手段】カム曲線記憶部64は、第1のカム曲線および第2のカム曲線を記憶する。制御部66は、カム曲線の切替え前は、各制御タイミングで、第1のカム曲線上の値に基づいて、従動側部材への位置指令値を求め、カム曲線の切替え後は、各制御タイミングで、第2のカム曲線上の値に基づいて位置指令値を求め、カム曲線の切替期間は、各制御タイミングで、第1のカム曲線または従動軸の位置に基づく第1のデータと、第2のカム曲線に基づく第2のデータとを加重平均した値に基づいて従動側部材への位置指令値を求める。
(もっと読む)
同期制御装置、同期制御方法、同期制御プログラム、および同期制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】従動軸に加わる衝撃を緩和し、かつ同期開始位置で確実に同期制御を開始することができる同期制御装置、同期制御方法、同期制御プログラム、および同期制御プログラムを記録したコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】ユーザ指令部62は、主軸と従動軸とが同期を開始する同期開始位置を指定する。カム曲線作成部64は、カム曲線を作成する。検出部65は、毎制御周期ごとの主軸の位置情報を検出する。制御部66は、同期開始位置までは、カム曲線と主軸の位置情報とに基づいて、制御周期ごとに従動軸に対する速度指令値を算出し、同期開始位置以降は、主軸と従動軸とのギア比に基づいて、制御周期ごとに従動軸に対する速度指令値を算出し、算出した速度指令値で従動軸を制御する。
(もっと読む)
産業機械および産業機械の制御方法
【課題】 短時間で容易かつ確実に原点位置の検出ができる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2を移動させる駆動力を発生する駆動モータ3と、スピンドル2の位置を制御するとともに駆動モータ3の回転速度を制御する制御装置4とを備えるものであって、スピンドル2の位置に基づく信号を検出するインクリメンタル型のリニアエンコーダ11と、駆動モータ3の絶対角度に基づく信号を検出するアブソリュート型のロータリーエンコーダ12とを備える。
(もっと読む)
サーボモータ制御回路
【課題】モータの作動異常判定を迅速に行うとともに、迅速にモータを停止させることが可能なモータ制御回路を提供する。
【解決手段】通信可能に接続された主制御装置から、制御対象を駆動するサーボモータの目標停止位置を含むサーボモータ駆動指令を受信する受信手段と、サーボモータの出力軸に設けられ、該サーボモータの回転位置を検出する回転位置検出手段と、サーボモータの回転位置が目標停止位置に到達するように、該サーボモータを駆動制御する駆動制御手段と、を備えるサーボモータ制御回路であって、サーボモータの回転位置の変化を検出する回転位置変化検出手段と、回転位置の変化に基づいて、該サーボモータが作動限界位置に到達したか否かを判定する作動限界判定手段と、を備え、駆動制御手段は、サーボモータが作動限界位置に到達したと判定したとき、主制御装置からのサーボモータ駆動停止指令を受信することなくサーボモータの駆動を停止する。
(もっと読む)
産業用コントローラ
【課題】 従来からユニット間データを送受する際に用いられているバス(システムバス)を利用し、同期制御専用のバスを持たせることなく同期制御機能を実現すること
【解決手段】 CPUユニットは、通常のサイクリックに行う処理実行中にタイマ割り込みが入ると、その処理を中断し、同期制御を行う他の同期ユニットに対してシステムバスを用いて同期データを一斉同報で送信する。同期ユニットは、一斉同報による同期データを受信したことを契機として同期サイクルを実行し、その同期サイクルの開始に伴い、受信した同期データを取得し、入出力処理を実行後、INデータの同期データのリフレッシュ処理(a)を行う。CPUユニットは、そのINデータの同期データリフレッシュを行い(b)、同期割り込みタスク処理により次に送信する同期データを求める(c)。同期ユニットは、常に最新の同期データを取得し、同時に動作する。
(もっと読む)
バックラッシュを抑制するサーボ制御装置
【課題】ポジションタンデム制御のモータ制御装置においてプリロードを付加することで、ショックを抑えることができるサーボ制御装置を提供する。
【解決手段】1つの被駆動体を駆動する2台のモータ15,25と、位置偏差値を演算処理して速度指令値を出力する位置制御部11,21と、速度指令値と速度検出器17,27から帰還される速度フィードバック値とに基づいて積分要素と比例要素で処理してトルク指令値を出力する速度制御部12,22と、トルク指令値に基づきモータの駆動電流を制御する電流制御部13,23と、速度制御部12,22の一方の積分要素の出力を他方の積分要素にコピーする速度積分器共通化手段5と、2台のモータ間のバックラッシュを抑制するために、各々のトルク指令値にそれぞれプリロードトルク値を付加する補正部6を備え、補正部は時定数回路を有し、プリロードトルク値を所定時定数に基づき徐々に付加する。
(もっと読む)
アクチュエータ駆動式且つフィードフォワード制御式の太陽追尾システム
アクチュエータ駆動式且つフィードフォワード制御式の太陽追尾システムは、少なくとも1枚のソーラーパネルを支持するサブフレームと、サブフレームを支持する支柱と、サブフレームと支柱とを連結するリンク型連結機構とを備えている。リンク型連結機構は、第1枢軸と、第2枢軸と、ボディ部材とを含んでいる。リンク型連結機構の第1枢軸と第2枢軸とは、それらの延在方向が実質的に互いに直交しており、ボディ部材によって離隔されている。このシステムは更に、少なくとも2つの直動型アクチュエータと、それらアクチュエータとサブフレームとを連結する回転ジョイント型連結機構と、それらアクチュエータを駆動する駆動系とを備えている。このシステムは更に、フィードフォワード制御系を備えている。フィードフォワード制御系はコンピュータを含み、このコンピュータは、複数のデータ点を入力として用いて直動型アクチュエータの目標動作位置を算出し、そして、駆動系とコミュニケートして直動型アクチュエータを駆動する。このシステムは更に、フィードバック制御系を備えている。フィードバック制御系は、センサデバイスによって収集された情報をフィードフォワード制御系へ中継し、フィードフォワード制御系とフィードバック制御系とは統合された1つの制御系として機能する。 (もっと読む)
作動制御方法および対回路基板作業装置
【課題】基板保持装置と、作業ヘッドと、その作業ヘッドと基板保持装置に保持された回路基板とを相対的に移動させる相対移動装置とを含む対基板作業装置において、作業ヘッドに作動,停止を繰り返させる際の衝撃や振動を抑制する。
【解決手段】相対移動装置を、作業ヘッドと基板保持装置との一方を保持して移動可能な可動部材と、駆動源を備えて可動部材を駆動する駆動装置と、可動部材の加速度を0から増加させた後、0まで減少させて、その可動部材の移動速度を0から増加させ、後に、加速度を0から減少させた後、0まで増加させて、移動速度を0まで減少させ、可動部材を第1位置から第2位置へ作動させるように駆動源を制御する制御装置とを含むものとし、制御装置を、可動部材の加速度を増加させる期間である加速度増加期間と減少させる期間である加速度減少期間とにおいて加加速度を非対称に制御する非対称制御部を備えたものとする。
(もっと読む)
分散型モーション制御システム
【課題】 コントローラから絶対時間を付与しない制御指令を非同期通信方式で送信し、複数のモータを同期制御させる分散型モーション制御システムを提供する。
【解決手段】 コントローラは各サーボアンプへ形状指令データ送信後、パラメータ加速度データ、パラメータ加加速度データ、パラメータ位置指令データまたはパラメータ速度指令データを各サーボアンプへ非同期通信方式で一斉同報送信し、各サーボアンプが、同期信号で定められたタイミングで、それぞれ受信した形状指令データおよびパラメータ加速度データ、パラメータ加加速度データ、パラメータ位置指令データまたはパラメータ速度指令データを処理し、各モータ間での同期制御を実現するため、絶対時間指令データを作成することなく、コントローラが非同期通信方式を使って、モータ群を同期制御することができる。
(もっと読む)
位置検出器をマルチドロップ接続した多軸制御システム
【課題】 多軸制御システムの統括CPUの負荷をサーボ制御回路に分散させるとともに、そのCPUを経由しないでマルチドロップ接続された位置検出器からの位置情報をサーボ制御回路に与える。
【解決手段】 コントローラにマスタ通信回路を設置し、位置検出器にはスレーブ通信回路を設置することで、位置検出器の信号線をマルチドロップ接続できるようにするとともに、マスタ通信回路とサーボ制御回路間に専用の信号線を配線する。また、サーボ制御回路を複数軸分統合する。さらには、マスタ通信回路をも統合する。
(もっと読む)
加速度軌跡生成装置
【課題】 制御対象の目標速度や目標位置を高精度に制御することができると共に、駆動源の駆動エネルギーを高効率に利用することができる加速度軌跡生成装置を提供すること。
【解決手段】 変速領域に対応する加速度軌跡は変速領域の遷移時間に基づいて曲線状に生成されるので、ジャークの変化率が抑制され、制御対象の目標速度や目標位置が高精度に制御される。また、加速度軌跡とモータのトルク軌跡との間に生ずる差が減少し、モータのエネルギーが高効率に利用される。
(もっと読む)
位置決め装置
【課題】多数の軸を簡素な接続手段で接続し、かつ制御ループを位置決め装置側でフレキシブルに実現できるシステム構成に対してロバストな制御ループを実現する位置決め装置を提供する。
【解決手段】1台の通信インターフェース111を介して複数台のサーボドライバ121〜123へ位置・速度指令を与えかつそこからフィードバックデータを受け取る通信制御部101と、通信制御部101から受け取ったフィードバックデータを基に位置・速度制御ループ演算を行う位置・速度制御部102、103とを有し、電流制御機能を有するサーボドライバ121〜123に指令を与えることで位置制御機能を実現する位置決め装置において、サーボドライバ121〜123からのフィードバックデータを時系列に格納する応答履歴バッファ107と、サーボドライバ121〜123に指令した速度指令や電流指令の履歴を格納する指令履歴バッファ108を備えた。
(もっと読む)
リニアパルスモータの制御方法
【課題】 プラテンの軌道面に沿ってX軸方向およびY軸方向に駆動される一群のフォーサを介してステージを所望位置に高精度で位置決めでき、かつ、迅速に整定できるリニアパルスモータの制御方法を提供する。
【解決手段】 プラテン4のXY平面上の所望位置に一群のフォーサ5X1,5X2,5Y1,5Y2を介してステージ3を駆動する際、フォーサ5X1,5X2,5Y1,5Y2のオープンループ制御によりステージ3は所望位置まで迅速に駆動され、フォーサ5X1,5X2,5Y1,5Y2のクローズドループ制御によりステージ3は所望位置に高精度に整定される。
(もっと読む)
サーボ制御装置
【課題】回転軸の慣性イナーシャが大きい場合や、回転軸が高速で回転する場合であっても、回転軸側と送り軸側との同期誤差を少なくすることができ、これにより高精度・高能率加工を行うことができるサーボ制御装置を提供する。
【解決手段】スピンドルモータ25に対する上位制御装置30からの指令及びスピンドルモータ25に設けられた検出器からフィードバックされたスピンドルモータ25の検出値の差である位置偏差と、送り側モータ26の上位制御装置30からの指令及び送り側モータ26に設けられた検出器からフィードバックされた送り側モータ26の検出値の差である位置偏差との差分である同期誤差に基づいて送り側モータ26の位置偏差を補正する補正データを算出する補正データ算出手段20を備え、補正データを送り側モータ26の位置偏差に加算し、同期誤差をゼロに近づける制御をする。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】 手作業によるタイミング調整が不要で、各ロボットの動作を同時に行わせることができるロボット制御装置およびロボット制御方法を提供する。
【解決手段】 コントローラ23は、移動開始位置から同期動作位置まで、各ロボットハンド19をそれぞれ最短時間で移動させるときの第1移動時間をロボット毎に計算し、計算した各第1移動時間のうちで、最も長くなる第2移動時間を決定する。そして決定した第2移動時間で、各ロボットハンド19を移動開始位置から同期動作位置まで停止させずに移動させるロボット動作計画をロボット毎に生成する。これによって各ロボットのロボットハンドが、移動開始位置から同期動作位置まで、それぞれ停止することなく移動し、同時に同期動作位置に到達する。したがって手作業によるタイミング調整を不要として、コントローラ23が、同期動作位置に移動した状態で、各ロボットの動作を同時に行わせることができる。
(もっと読む)
モーションコントロールシステム
【課題】リアルタイム性が保証出来ないようなローコストなモーションコントローラを使ってもモーションコントロールシステムを構築できるようにする。
【解決手段】サーボドライブ50、60がデータチェック処理をするとき、通信エラーを検出しても、その検出回数がパラメータ格納部505、605に設定した許容エラー回数まではエラー処理部506、606の処理を実行させず、指令データの平均化処理を行う。
(もっと読む)
同期制御装置
【課題】 機械にショックを与えることなく、緩やかに同期倍率の変更を行う。また、同期倍率変更の緩やかさを設定できるようにする。
【解決手段】 同期倍率変更前後のブロック間に同期倍率を緩やかに変更するブロックを追加する。該ブロックで指定されている、同期倍率変更前後の同期倍率a、b、マスタ軸の移動量p、スレーブ軸の移動量q及び同期倍率変更が完了してからのマスタ軸の残移動量v(又は、当該ブロックの移動開始から同期倍率変更開始位置までのマスタ軸の移動量u)を読み出す。これらのデータより同期倍率変更の傾き、及び、移動量u(残移動量v)を求める。移動量u、残移動量v、同期倍率変更の傾きに基づいて、スレーブ軸を制御する。同期倍率が緩やかに変更されるから、機械にショックを与えることはない。又、この同期倍率の傾きは、指定データp,q,v(又はu)によって決めることができる。
(もっと読む)
アクチュエータ制御装置
【課題】アクチュエータの種類を問わず、共通の命令で制御することが可能であるとともに、アクチュエータの種類を含む変更が容易なアクチュエータ制御装置を提供する。
【解決手段】アクチュエータにサーボ機構58を介して接続される制御装置は、プログラムに従って当該アクチュエータの動作を制御するとともに、通信制御装置122を介して他のアクチュエータあるいは上位の主制御装置と同一のインタフェースで通信を行うことにより、相互に協調してワークに対する作業を遂行する。
(もっと読む)
1 - 19 / 19
[ Back to top ]