
Fターム[5H501LL16]の内容
電動機の制御一般 (20,975) | 検出変量、検出手段 (3,871) | 速度検出 (959) | センサレスで検出するもの (103) | 電気的変量の検出によるもの (82) | 逆起電圧検出によるもの (12)
Fターム[5H501LL16]の下位に属するFターム
Fターム[5H501LL16]に分類される特許
1 - 11 / 11
SCRシステムのポンプを制御するための方法
SCRシステムのモーター駆動ポンプを制御するための方法であって、当該ポンプは、圧力を供給し、この圧力に関連する流体力学的トルクに、そしてさらに抵抗トルクにさらされ、かつ、電流が供給されるコイルを備えかつこの電流に関連したトルクを発生させる電気モーターによって駆動され、当該方法によれば、ポンプを制御するために、モーターのコイル中の電流を測定するための手段と、モーターによって消費される全電流のレギュレータと、異なる速度での無負荷条件の下でポンプを回転させることによってかつ関連する電流を測定することによって得られた抵抗トルク(すなわち乾燥摩擦)の一部の推定を用いる電流と圧力との間の関係のモデルとが利用される。  (もっと読む)
(もっと読む)
モータ回転数予測装置
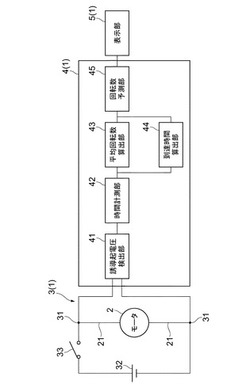
【課題】本発明は、モータに対する通電停止時のロータの回転数を高精度に予測する。
【解決手段】
本発明のモータ回転数予測装置1は、誘導起電圧を検出する誘導起電圧検出部41と、誘導起電圧検出部41の検出結果に基づき、惰性により回転するロータ22の一回転にかかる時間を複数計測する時間計測部42と、時間計測部42の計測結果に基づき、時間計測部42の計測時におけるロータ22の平均回転数を算出する平均回転数算出部43と、モータ2の通電停止時から、平均回転数算出部43の算出したロータ22の平均回転数に到達するまでの時間を算出する到達時間算出部44と、プログラムされたラグランジュ補間公式を有し、平均回転数算出部43の算出結果と到達時間算出部44の算出結果とをラグランジュ補間公式に入力して、通電停止時のロータ22の回転数を予測する回転数予測部45と、を備える。
(もっと読む)
電動式打込機

【課題】
小型、軽量な電動式打撃工具を提供することを目的とする。
【解決手段】
ハウジングと、トリガと、前記ハウジングに取り付けられて打込側位置に釘を供給するマガジンと、前記釘を打込むプランジャと、前記ハウジングに設けられたモータと、前記モータの動力を前記プランジャの付勢力に変換する機構部と前記モータの駆動を制御する制御回路を有する電動式打込機において、前記ハウジング内に加速度センサを設け、前記加速度センサの出力に基づいて、前記モータの制御を行うこととした。
(もっと読む)
モータの制御装置及びそれを備えた転動ロボット
【課題】筐体の着地時における衝撃を抑制することができるとともに、筐体の動作パターンを増加させることができるモータの制御装置及びそれを備えた転動ロボットを提供する。
【解決手段】演算装置は、メインモータの回転角度を検出する回転角度検出手段の検出結果に基づいて、メインモータの回転速度を算出する回転速度変換器を備え、操作量演算部50は、筐体の角速度を検出する角速度センサの検出結果に基づいて、筐体の傾斜角を算出する傾斜角算出手段53と、筐体の現在の傾斜角と、目標値設定部で設定された目標傾斜角との傾斜角偏差信号に基づいて、傾斜角偏差に応じた出力信号を算出する傾斜角設定手段54と、メインモータの現在の回転速度と、目標値設定部で設定された目標回転速度との回転速度偏差信号に基づいて、回転速度偏差に応じた回転速度設定手段56とを備えていることを特徴とする。
(もっと読む)
モータ電流検出方法
【課題】 モータのブリッジ駆動回路に於いて、電源からの電流流入量のみに基づき、モータのコイルに流れる実電流を検出可能とする方法を提供する。
【解決手段】 モータに発生する逆起電圧、インダクタンス等の回路要素による影響を考慮することにより、電源からの電流流入量から、モータの実電流をより正確に判定する。それによりモータの発熱量をより正確に判定することが可能となる。特に、モータ電流を算出するステップが、各デューティサイクルに於ける最大電流及び最大電流を逐次的に求めるステップを含むものであるとすると良い。
(もっと読む)
電動機制御装置およびそれを用いた空気調和機
【課題】電動機制御装置において、シンプルで低コストな回路構成で、電動機の欠相を検出すること。
【解決手段】電動機4の電流検出手段6と、前記電流検出手段6によって検出した電流値の電動機の回転周期以上の所定時間における最大値と電流基準値12とを比較し回転異常を判定する回転異常判定手段18と、前記回転異常判定手段11にて回転異常と判定した時前記電動機4の動作を停止させる保護動作手段14を備え、電動機4始動時より第1の所定時間経過後、前記回転異常判定手段18による回転異常判定が第2の所定時間継続した場合に、電動機4の欠相と判断し電動機4の動作を停止させる。
(もっと読む)
電動機制御装置およびそれを用いた空気調和機
【課題】シンプルで低コストな回路構成で、電動機の欠相を検出すること。
【解決手段】電動機4の電流検出手段6と、前記電流検出手段6によって検出した電流値と電流基準値12とを比較し回転異常を判定する回転異常判定手段18と、前記回転異常判定手段11にて回転異常と判定した時前記電動機4の動作を停止させる保護動作手段14を備えるマイクロコンピュータで構成し、電動機4始動時より第1の所定時間経過後、前記回転異常判定手段18による回転異常判定が第2の所定時間継続した場合に、電動機4の欠相と判断し電動機4の動作を停止させることが可能となる。
(もっと読む)
モータ駆動用インバータ制御装置
【課題】位置センサレスベクトル制御を適用したモータ駆動用インバータ制御装置において、推定演算された実回転数が実際のモータ回転数と一致しない場合でもモータ回転駆動状態を正しく判断し、異常なモータ回転駆動状態でモータ回転駆動が継続することを防止する。
【解決手段】起動直後を除き、モータ回転数より導出される推定誘起電圧値および指示電流値の上下限値の少なくとも一方を超過する場合にモータ回転駆動状態が無回転である、あるいは実回転数推定演算部からの推定演算結果が所定の上下限値の少なくとも一方を超過する場合にモータが異常回転であると判断するモータ回転判定部を備え、異常なモータ回転駆動状態での運転継続を防止する。
(もっと読む)
記憶装置、スピンドルモータ制御方法及びプログラム
【課題】媒体枚数の異なる装置であっても、共通のスピンドルモータ制御部により所望の制御特性を広範囲の使用条件においても維持可能とする。
【解決手段】 デフォルトゲインテーブル52に媒体の枚数毎に予め定めたスピンドルモータ制御部46のループゲインを記憶する。ループゲイン設定部50は、媒体の枚数を検出し、検出した媒体枚数に応じたループゲインをデフォルトゲインテーブル52から読み出してスピンドルモータ制御部46に設定する。ループゲイン測定部48は製造工程の試験で、スピンドルモータ制御部46のループゲインを測定して最適ループゲインに調整し、これをデフォルトループゲインとして装置に記憶する。
(もっと読む)
ステッピングモータの速度制御方法及びその装置
【課題】ステッピングモータが均一な瞬間速度を持つように制御する速度制御方法及びそれに適した装置を提供する。
【解決手段】一定の速度で回転するステッピングモータの各フェーズの反復速度誤差を算出し、フェーズ別に算出された反復速度誤差を保存する過程と、目標速度によるステッピングモータの回転速度を測定する過程と、ステッピングモータの回転に同期して保存された反復速度誤差をフェーズ別に順次的かつ反復的に読み取る過程と、目標速度、測定された回転速度、そしてフェーズ別反復速度誤差を参照してステッピングモータの速度を制御する過程と、を含むステッピングモータの速度制御方法。これにより、本発明によるステップモータの速度制御装置は、ステッピングモータのフェーズ別に回転速度を制御することによって、ステッピングモータが均一な瞬間速度で回転できる。
(もっと読む)
スピンドルモータの正常回転速度駆動方法及びスピンドルモータの正常回転速度駆動装置
【課題】温度または流体の粘度を測定するためのセンサを備えていなくてもスピンドルモータの回転速度を正常回転速度まで上げるための流体動圧ベアリングへの加熱を制御できるスピンドルモータの正常回転速度駆動装置を提供する。
【解決手段】スピンドルモータの回転速度を検出する回転速度検出部と、検出された回転速度が前記正常回転速度以上であるかを調べる回転速度比較部200と、回転速度比較部200の判断結果に応答して、流体動圧ベアリングを加熱するヒーティング部220と、を備える。
(もっと読む)
1 - 11 / 11
[ Back to top ]