
Fターム[5H501MM20]の内容
電動機の制御一般 (20,975) | 保護、補償、監視、表示 (962) | その他 (34)
Fターム[5H501MM20]に分類される特許
1 - 20 / 34
負荷駆動装置

【課題】負荷電流検出手段により検出された負荷電流を用いてリーク故障を確実に検出する。
【解決手段】駆動回路33a、33bの出力端子Ta2、Tb2から電源線6に至る還流経路内にシャント抵抗9a、9bを接続し、電源線5と給電分岐点Nsとの間に共通のシャント抵抗24を接続する。駆動制御回路32は、MOSFET7a、7bをPWM駆動し、負荷電流検出回路12a、12bから負荷電流Ia、Ibを入力し、総電流検出回路23から総電流Isを入力する。検出負荷電流Ia、Ibに対しそれぞれ対応するPWM駆動信号のオフ駆動期間をマスク処理し、マスク処理した検出負荷電流Iam、Ibmを加算した加算電流Icmと検出総電流Isとを比較する。両者が等しい場合には正常状態と判定し、異なる場合にはショート故障またはリーク故障が生じたと判定する。
(もっと読む)
モータ制御装置

【課題】ラジオノイズを低減することができるとともに、モータの制御装置の製造コストを低減する。
【解決手段】モータ制御装置の制御部12は、ラジオ受信機13からラジオ周波数信号を受信すると、モータ11を制御するパルス信号の周波数とラジオ周波数とを比較検討する。パルス信号の周波数の整数倍した所定の周波数が、ラジオ周波数を含む所定の周波数帯域内に含まれる場合には、デューティ比を一定にしたまま、パルス信号の周波数を変更する。
(もっと読む)
モータの駆動制御システムおよび駆動制御方法
【課題】位置検出データの転送誤りを敏速に検出することにより、初回稼動時から不用意な暴走を確実に防止する駆動制御システムを提供する。
【解決手段】位置検出器に位置データの監視機能をもたせ、位置検出器が保持した最新位置データと、サーボ制御装置から出力させた最新位置データのエコーバック信号とを比較判定して、差異があるときには駆動禁止状態に遷移して、駆動禁止信号をサーボ制御装置に出力する。サーボ制御装置では、駆動禁止信号を入力すると駆動禁止状態に遷移して、フィードバック用位置データを最新位置データから推定位置データに切替え、指令信号を運転指令から所定の停止制御指令信号に切替え、速度、トルクがゼロに下がるまでは駆動を継続しながらモータを停止させる。
(もっと読む)
インクジェット記録装置及びキャリッジ制御方法
【課題】短距離の移動でも高精度にキャリッジ位置決めを行うことができる記録装置と制御方法を提供する。
【解決手段】記録ヘッドを搭載したキャリッジをキャリッジモータから供給される駆動力によってガイドレールに沿って往復移動させながら、記録ヘッドからインクを吐出して記録媒体に記録を行う際に、キャリッジの往復移動方向に沿ったキャリッジの位置を検出し、位置検出信号に基づいて、キャリッジ速度を算出し、次に、その位置検出信号とキャリッジ速度信号とをフィードバックしてキャリッジモータを駆動制御する。そのフィードバック制御において、キャリッジモータを駆動制御するために用いられるモータ指令値に対して、キャリッジとガイドレールとの間に生じる摩擦による損失を補償し、その補償は算出された速度信号に基づいて、その摩擦が静止摩擦或は動摩擦であるかを判断し、その判断に従って補償値を決定する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】回転角速度検出を行うことなく、精度よく、電力供給経路における通電不良の発生を検出することのできるモータ制御装置を提供すること。
【解決手段】通電不良検出部は、通電状態にあるべき特定相(X=U,V,W、|Ix*|>I2)の相電流値が非通電状態を示す値(|Ix|<I1)であり、且つ他相の相電流値が通電状態を示す値(|Iy|>I3)である場合には、その特定相に通電不良の発生を示す異常があると判定する。
(もっと読む)
電源供給装置
【課題】トランジスタ素子がオフされた原因がモータのロック又は過電流のどちらであるのかを判定すること。
【解決手段】ショート/ロック電流判別部23が、トランジスタ素子10の通電電流Iがロック電流検出閾値Ith以上であるか否かを判別し、通電電流Iがロック電流検出閾値Ith以上になった履歴を記憶する。そして、ショート/ロック電流判別部23は、電線保護のためにトランジスタ素子10がオフされた際、記録されている履歴を参照してトランジスタ素子10がオフされるまでに通電電流Iがロック電流検出閾値Ith以上になったか否かを判定し、通電電流Iがロック電流検出閾値Ith以上になった場合、過電流によるトランジスタ素子10のオフ動作と判断し、通電電流Iがロック電流検出閾値Ith以上になっていない場合には、ロック電流によるトランジスタ素子10のオフ動作であると判断する。
(もっと読む)
電気車制御装置
【課題】軸固着を正確に検知する電気車制御装置を提供する。
【解決手段】電気車制御装置は、集電装置などにより集電した直流電力を交流電力に変換する電力変換手段12と、前記電力変換手段により変換された交流電力により複数の軸を個別に駆動する複数の電動機13と、前記複数の軸の回転速度を検出する速度検出手段14と、を具備する。電気車制御装置は、予め基準値を記憶し、検出される前記複数の軸の回転速度と予め記憶されている基準値とに基づいて異常の有無を判定し、異常を検知した場合、異常が軸固着であるか前記速度検出手段14の故障であるかを判別する。
(もっと読む)
ユニットの容量制御のための個別の周波数を用いた動作
冷媒システム20において使用される可変速電気駆動部は、モータ40の動作周波数の関数である可変速度で関連した構成要素22を駆動する電気モータ40と、連続的な可変速度で関連した構成要素22を駆動するように電気モータに交流の個別の駆動周波数を供給するためのコントローラ42と、を備えている。コントローラ42は、関連した構成要素22を駆動する平均合成可変速度が、選択した少なくとも2つの個別の周波数の組み合わせの関数となるように、少なくとも2つの個別の周波数の間で電気モータ40への駆動周波数を循環させる。 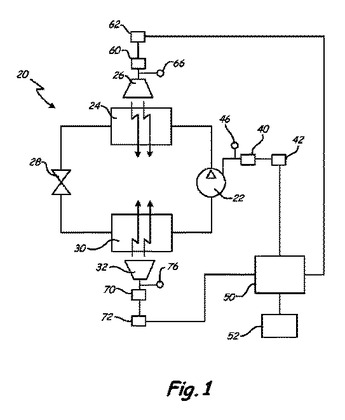 (もっと読む)
(もっと読む)
負荷短絡保護回路
【課題】モータにおける高い動作効率を得る。
【解決手段】NMOSトランジスタQ2は、モータ10を接地に対して時間的に断続して接続する。検知回路30aは、NMOSトランジスタQ2がモータ10を接地に対して接続してから所定時間経過後において、NMOSトランジスタQ2のモータ10への接続点の電位Vaを検知する。制御回路20は、モータ10が短絡状態にあると判断される範囲に接続点の電位Vaがある場合に、モータ10への電源供給を遮断するようにNMOSトランジスタQ2を制御する。
(もっと読む)
モータ制御装置
【課題】安全性を確保しつつ低温環境で使用した場合でもモータが本来的に有する性能を出し切れるようにすること。
【解決手段】モータ21を制御するとともに、モータ21の電流値と通電時間又は停止時間に基づいてモータ21の発熱温度を推定し、推定された発熱温度が、規制値以上となったときにモータ21に流す通電量を規制する制御部30と、車両の所定の位置の温度を検出する複数の温度センサ51〜53と、を備える。制御部30は、システム起動時に温度センサ51〜53からの温度信号に基づいてモータ21の初期温度を推定するとともに、推定された初期温度に応じて規制値を決定する。制御部30は、推定された初期温度が高くなるにつれて低くなるように規制値を決定する。
(もっと読む)
モータの駆動装置および駆動方法
【課題】モータにおいて、コイルの絶縁性能を確保するための過剰設計を行うことなく、長期に亘って、コイルの絶縁性能の劣化を抑制しつつ高い駆動効率を維持する。
【解決手段】電圧変換器(昇圧コンバータ)が、直流電源の電圧を変圧(昇圧)して出力し、インバータが、電圧変換器の出力電圧(システム電圧VH)を交流電圧に変換してモータのコイルに印加する。ここで、制御手段(制御装置)が、電圧変換器の出力電圧がモータのコイルにおける部分放電を引き起こす所定の状態(所定電圧Vc以上へ移行した状態)であると判断された履歴(積算値N)を取得する。そして、制御手段が、その取得した履歴に基づき、電圧変換器の出力電圧をより低い値となるよう制御する(積算値Nが閾値Ncに到達していれば、ステップS6で制御目標値の上限値VlをVsまで低下させる)。
(もっと読む)
永久磁石型モータの自己減磁装置及び電気製品の運転停止方法
【課題】永久磁石型モータを使用する電気製品が寿命に近づいた場合、電気製品の運転を安全に停止することができる永久磁石型モータの自己減磁装置を提供することを目的とする。
【解決手段】この発明に係る永久磁石型モータの自己減磁装置は、巻線、永久磁石を有する永久磁石型モータの自己減磁装置において、永久磁石型モータ1を回転駆動するための駆動回路と、永久磁石型モータ1に過電流が流れた場合に、永久磁石型モータ及び駆動回路を保護する過電流保護回路45と、過電流保護回路45を解除する過電流保護回路解除部46と、過電流保護回路解除部46により、駆動回路に流れる電流の制約をなくした後、駆動回路を減磁装置として用いることにより、永久磁石型モータ1の巻線へ所定の電流を通電し、永久磁石型モータ1の永久磁石を減磁させる自己減磁動作を行い、電気製品の使用を不能とさせる制御回路部42とを備えたことを特徴とする。
(もっと読む)
電動機制御装置およびそれを用いた空気調和機
【課題】電動機制御装置において、シンプルで低コストな回路構成で、電動機の欠相を検出すること。
【解決手段】電動機4の電流検出手段6と、前記電流検出手段6によって検出した電流値の電動機の回転周期以上の所定時間における最大値と電流基準値12とを比較し回転異常を判定する回転異常判定手段18と、前記回転異常判定手段11にて回転異常と判定した時前記電動機4の動作を停止させる保護動作手段14を備え、電動機4始動時より第1の所定時間経過後、前記回転異常判定手段18による回転異常判定が第2の所定時間継続した場合に、電動機4の欠相と判断し電動機4の動作を停止させる。
(もっと読む)
モータ制御装置
【課題】複数組の駆動巻線を持つモータの大形機械への接続状態を配線変更することなく切換え、異常検出の運転パタンより配線異常を検出し、モータの暴走を防止することのできる制御装置を提供する。
【解決手段】モータ制御装置に電流レベル設定回路と励磁位相設定回路を有する誤配線検出装置を設け、誤配線検出モードに切換えて、誤配線検出用の所定の運転指令パタンでモータを電流制御運転することにより、モータの現在位置の変化や駆動巻線に流れる電流レベルから駆動巻線の配線状態を確認する。
(もっと読む)
速度制御装置における負荷変動補償方法
【課題】回転する機械装置の負荷変動量が大きいと機械装置を安定した速度で運転させることができず、生産設備の場合、製品の品質に悪影響を及ぼす。
【解決手段】機械装置の負荷変動の位置、量およびパターンをあらかじめ測定しておき、制御装置のトルク指令を負荷変動の発生する位置で補正することにより負荷変動による機械の回転速度への影響を軽減させる。
機械装置の回転軸に取り付けたインクリメンタルエンコーダおよび機械装置の原点を検出する近接スイッチ、またはアブソリュートエンコーダなどを設け、これより得られる機械の回転角度(位置)情報により機械のどの位置で負荷変動が発生するかを計測する。負荷変動量は、速度制御装置のトルク指令または電流指令の量を観測することで得る。
機械の回転角度(位置)が負荷変動の発生する位置に来たときあらかじめ設定しておいた負荷変動補償パターンを速度制御装置のトルク指令に加算する。
(もっと読む)
光ディスク装置
【課題】DCモータの短絡を正確に判定する。
【解決手段】DVDレコーダ100は、スピンドルモータ52に印加する駆動電圧を制御する制御信号VC1を生成するモータ駆動部322と、制御信号VC1をPWM形式の制御信号として出力するPWM出力部324と、PWM形式の制御信号を平滑化する平滑回路421と、平滑回路421を介して入力された制御信号に基づいてスピンドルモータ52に駆動電圧VOを印加するドライバIC42と、駆動電圧VOを検出する駆動電圧検出回路522と、制御信号VC1を所定時間だけ遅延させるLPF325と、LPF325を介して入力される制御信号である遅延制御信号VC2及び駆動電圧VOに基づいて、スピンドルモータ52が短絡しているか否かを判定するマイコン321と、を備えている。
(もっと読む)
サーボモータおよび多関節ロボットの異常負荷検出制御方法
【課題】サーボモータあるいはサーボモータを備えた多関節ロボットが障害物等に接触して異常負荷を検知した時に、速やかに前記障害物等から離れて前記異常負荷を回避する方法を提供する。
【解決手段】外乱推定オブザーバを用いてロボットが受ける外乱トルクを推定し、該外乱推定値が設定基準値以上になることによって異常負荷を検出するロボットの異常負荷検出制御方法において、前記ロボットが、プログラムにより作業を開始する前に前記設定基準値を所定値に設定し、前記作業が終了後、前記設定基準値を前記所定値と異なる値に設定するものである。
(もっと読む)
車両用操舵制御装置
【課題】 自励振動を効果的に抑制しつつ、自励振動抑制制御の解除時における転舵の応答遅れを最小限に抑えることができる車両用操舵制御装置を提供する。
【解決手段】 前輪11,11の転舵角に対するステアリングホイール10の操舵角の比であるステアリングギア比を可変する前輪操舵アクチュエータ5と、ステアリングホイール10の操作状態に応じた目標前輪舵角を設定し、その目標前輪舵角に基づいて前輪操舵アクチュエータ5へ供給する電力をPWM制御する電流制御部42と、目標前輪舵角と実転舵角との偏差が所定値以下の場合、デューティ指令値を一定に維持するデューティ指令値補正手段(アクチュエータ自励振動判断部43、デューティ指令補正値演算部44、制御切り替え部45)と、を備える。
(もっと読む)
PMモータの磁石渦電流損失解析方法
【課題】2次元解析と同等の計算時間で容易にPMモータの磁石渦電流損失を求める。
【解決手段】PMモータの2次元モデルを作成し(S1)、このPMモータの2次元モデルを用い、有限要素法による2次元磁場解析により、磁石の渦電流を考慮することなく、磁石内部の磁束密度の時間変化を求め(S2)、この磁石内部の磁束密度の時間変化を、磁石のみの3次元モデルに与え(S3)、磁石3次元モデルと磁束密度の時間変化から、有限要素法により、磁石の渦電流を考慮した3次元解析を行い(S4)、これで求める磁石の渦電流密度の時間変化から、磁石渦電流損失密度を算出する(S5)。
(もっと読む)
電動機制御装置、電気掃除機及び手乾燥装置
【課題】モータ電流をA/D変換器で検出するに当たり、ノイズ成分を抽出するためのハイパスフィルターを設けることなく、また、A/D変換器で検出した値を積分器で積分する必要もなく、A/D変換器の変換速度も高速のものでなく、安価で簡便で検出精度の高い電動機制御装置、電気掃除機及び手乾燥装置を得る。
【解決手段】モータ電流を測定する電流検出手段31の出力をノイズ成分のみを抽出することはなく、所定の位相角におけるモータ電流値を測定するように、商用電源の半周期毎に、商用電源電圧のゼロクロスから所定のタイミングT1で、所定回数例えば1回だけA/D変換器33でサンプリングし、サンプリングした電流の検出値の所定時間内での最大値と最小値との差の大小から火花の異常を判断し、電動機2を制御するようにした。
(もっと読む)
1 - 20 / 34
[ Back to top ]