
Fターム[5H505DD03]の内容
交流電動機の制御一般 (51,584) | 電動機の種類 (6,219) | 多相電動機 (2,279)
Fターム[5H505DD03]に分類される特許
2,001 - 2,020 / 2,279
交流電動機の制御装置

【課題】複数のモータを一つのCPUでベクトル制御する際に、演算負荷の増加や制御の遅れを抑制しながら演算タイミングやキャリア周期の設定の自由度を向上させる。
【解決手段】回転角度と電流値とをデジタル演算手段に読み込み、その読み込んだデータに応じて電流フィードバック制御演算を行う場合に、「回転角度の読み込みおよび電流値のAD変換処理を行い、読み込んだ回転角度と電流値に基いて電流フィードバック制御演算を行う処理」を、回転角度の読み込みおよび電流値のAD変換終了までを行う「回転角度と電流のデータ読み込み処理」と読み込んだデータに応じて電流フィードバック制御演算を行う「演算処理」とに分割して別々の割り込み処理とし、かつ、前記「回転角度と電流のデータ読み込み処理」を「演算処理」よりも優先度の高い割り込み処理に設定するように構成した交流電動機の制御装置。
(もっと読む)
同期電動機駆動装置

【課題】負荷条件が変化しても磁極位置推定精度にばらつきが生じない同期電動機駆動装置を提供する。
【解決手段】電源投入後に磁極位置推定を行い、トリガ信号生成開始信号を出力する磁極位置推定器1と、トリガ信号を出力するトリガ信号生成器2と、電流位相保存トリガ出力と電流位相復元トリガ出力とを切り変えるトリガ切替器3と、トリガ入力時に電流位相保存データを出力する電流位相データ保存器4と、電流位相保存データを記憶する電流位相データ記憶器5と、トリガ入力時に電流位相保存データを電流位相復元データとして出力する電流位相データ復元器6と、磁極初期位置と電流位相復元データと同期電動機位置から電流位相データを出力する電流位相データ検出器7とを備え、トリガ信号生成器2により出力されるトリガ信号Trg1のタイミングで電流位相データの保存と復元を切替える。
(もっと読む)
充電制御装置を兼ねたモータ駆動装置
【課題】
外部充電電源の接続状態を検出し、インバータをモータ駆動モードと二次電池の充電モードとに確実に切替えるモータ駆動装置の提供。
【解決手段】
インバータの交流出力の1相に接続するダイオードを介して、接続端子と電圧検出器を接続し、この接続端子と別の接続端子とに着脱できる充電電源を接続し、電圧検出器で検出した充電電源の電圧を基にして、充電電源の接続状態を充電電源接続判定回路で判断し、これを受けてモード切替制御回路が出力する切替信号によって、インバータ駆動回路が、インバータをモータ駆動モードあるいは二次電池の充電モードに切替える。
(もっと読む)
多相インバータ及びその制御方法、並びに送風機及び多相電流出力システム
【課題】プリチャージ期間において外因によって多相負荷に電圧が発生しても、ローアームスイッチング素子に過電流が発生することを困難とする。
【解決手段】U相電流iu、V相電流iv、W相電流iwのいずれかが負の所定値よりも更に小さければ(絶対値が大きければ)、その中の最大値がどれであるかを判断する。電流iuが最大値である場合にはステップS103へと処理を進め、ローアームスイッチング素子Qx,Qy,Qzをそれぞれオン、オフ、オフする。電流ivが最大値である場合にはステップS104へと処理を進め、ローアームスイッチング素子Qx,Qy,Qzをそれぞれオフ、オン、オフする。電流iwが最大値である場合にはステップS105へと処理を進め、ローアームスイッチング素子Qx,Qy,Qzをそれぞれオフ、オフ、オンする。
(もっと読む)
電動機
本発明は電動機(1)、殊に繊維機械用の電動機に関する。当該電動機は、供給電圧の欠落時に発電機として作動し、電動機(1)の回転子として構成されたロータ並びに多相電動機(1)を位相制御するモータ回路(3)を含み、当該モータ回路は複数の半導体構成素子(4、5、6、7、8、9、10、11)を含み、前記電動機(1)は、発電モードの間の所定境界値の通過時に短絡可能である。前記境界値通過時の短絡は、モータ回路(3)が含んでいる前記半導体構成素子(4、5、6、7、8、9、10、11)のうちの1つまたは複数の半導体構成素子を、動作状態をあらわす信号によって駆動制御することによって行われる。 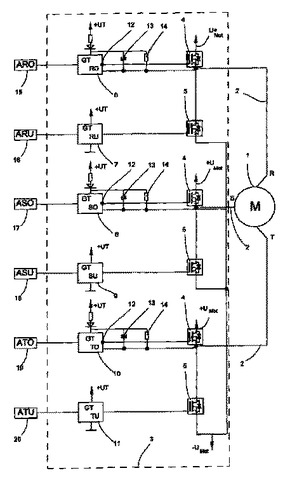 (もっと読む)
(もっと読む)
交流モータ駆動装置及びその制御方法
【課題】 安価で省スペースの交流モータ駆動装置を提供する。また、PWMパルスパターンに依存せずゼロ速度から高速回転まで、高精度にトルクを制御できる交流モータ制御装置、電動アクチュエータ、あるいは車両を提供する。
【解決手段】 交流モータ駆動装置は、交流モータに給電するインバータ、モータ又はインバータに流れる電流を検出する電流センサ、モータのロータ回転を検出する回転センサ、並びにインバータを駆動する制御器とを備える。ここで、電流センサが検出した電流検出値と、ロータ回転位置を用いて3相のモータ電流値を推定し、このモータ電流推定値を用いてインバータを制御する。
(もっと読む)
永久磁石同期電動機の制御装置
【課題】本発明は、永久磁石同期電動機を同期運転モードで起動する際に、速度を効果的に抑制する制御装置を提供することを目的とする。
【解決手段】本発明は、界磁として永久磁石を有する永久磁石同期電動機と、d軸電流指令値と、q軸電流指令値と、周波数指令値とに従って前記永久磁石同期電動機に印加する電圧指令値を求める電圧指令値作成器と、前記電圧指令値に従って前記永久磁石同期電動機に電圧を印加する電力変換回路とを備えた永久磁石同期電動機の制御装置において、前記永久磁石同期電動機の同期運転モードで起動する際に、永久磁石同期電動機のq軸電流を検出し、検出されたq軸電流値にゲインをかけ、その演算結果を前記周波数指令値から減算して周波数指令値を修正することを特徴とする。
(もっと読む)
誘導電動機制御装置
【課題】駆動信号の波形形状に係わらず、インバータ回路が発生する交流信号に高調波成分を注入することが可能な誘導電動機制御装置を提供すること。
【解決手段】、コントローラ50は、インバータ回路20を構成する各スイッチング素子21A,21B,22A,22B,23A,23BをPWM信号によって駆動する。このPWM信号のキャリア周波数は、コントローラ50によって、回転磁界を発生させるためにモータ30の各固定子巻線に与える交流信号の励磁周波数に応じて制御される。これにより、交流信号に、所望の周波数の高調波成分を注入することができる。
(もっと読む)
電力変換装置
【課題】 速度補正に対する応答を、共通の速度基準に対する応答より速くしてプロセスラインの生産性を向上させる電力変換装置を提供する。
【解決手段】 直流を所望の交流に変換して電動機を駆動するインバータ1と、インバータ1にゲート信号を与える制御部3と、電流検出手段5と、速度検出手段4とで構成し、制御部3は、外部から与えられる速度基準を入力として加減速用トルク基準と速度モデルを演算する速度モデル演算部31と、前記速度モデルと外部から与えられる速度補正指令と前記速度検出手段から得られる速度帰還信号を入力とし、その出力に前記加減速用トルク基準を加算してトルク基準を出力する速度制御部32と、このトルク基準と前記電流検出手段で検出された電流に基づいて前記電動機の励磁軸とトルク軸の電流を独立して制御するベクトル制御またはセンサレスベクトル制御手段とを備えるようにする。
(もっと読む)
永久磁石同期電動機の制御方法
【課題】 PWMインバータのスイッチング素子の保護が、電動機回転子軸のロックに際しても確実に得られるようにした永久磁石同期電動機の制御方法を提供すること。
【解決手段】 永久磁石同期電動機をPWMインバータにより駆動する方式の制御方法において、永久磁石同期電動機の回転子軸がロックし、インバータの特定のスイッチング素子に直流電流が通流された場合、当該永久磁石同期電動機のロックをステップ220で検出し、ロックが検出されたら、ステップ280でPWMインバータのキャリア周波数を低減させるようにしたもの。これよりスイッチング素子のスイッチング損失が低減されるので、当該スイッチング素子に通流されている電流を低下させることなく、当該スイッチング素子の発熱量を抑え、保護が図れることになる。
(もっと読む)
モータ駆動回路及び露光装置
【課題】 高速応答が可能であり、リレーや特別のパワー素子を必要としない、急速停止機能を有するモータ駆動回路を提供する。
【解決手段】 モータを緊急停止させるときは、スイッチSW1を抵抗R6側に切り換える。抵抗R6には、抵抗R3は抵抗R6の入側に接続されており、U相巻線に印加されている電圧がかかっている。オペアンプOP2は、この電圧と0Vとの差に比例する電圧をコンパレータCP1に出力する。よって、PWMによる電流制御回路として働いていた前述の回路は、3相モータのU相巻線に印加される電圧を0Vにするような電圧制御回路として働くことになる。これにより、3相モータは発電制動を受け、急激に停止する。
(もっと読む)
サージ低反射機器
【課題】 給電ケーブルと機器との間の線路に、高コストとならずにサージ電圧抑制の効果が十分に得られるようインピーダンス整合部を接続し、またその効果を確認できるようにしたサージ低反射機器を提供する。
【解決手段】 電力用の給電ケーブル4の片端が外部接続端子6u,6v,6wに接続された交流電動機2と、この交流電動機2の外部接続端子6u,6v,6wに接続され、交流電動機2と給電ケーブル4とのインピーダンスの整合を、インピーダンス整合回路9を設けて行うインピーダンス整合部3と、このインピーダンス整合部3に設けられ、交流電動機2に所定電圧以上のサージ電圧が加わった際に表示を行う表示回路10とを具備する。
(もっと読む)
モータ駆動制御装置
【課題】騒音を低減するための機構を追加することなく、モータとモータに結合された負荷との組み合わせで発生する騒音を抑制するモータ駆動制御装置を提供する。
【解決手段】モータ8を駆動するインバータ回路7と、前記モータ8の回転速度を制御する制御部6とを備え、前記制御部6は、前記モータ8の回転速度を、目標回転速度を中心として正弦波状に増減させることを特徴とするもので、モータ8に取付けられた負荷の固有振動数と、モータ8の回転速度に比例する制御周期から発生するモータ8自身の振動周波数が近接したときに発生する騒音を低減するものである。
(もっと読む)
無停電電源装置およびその運転方法
【課題】 電動機負荷とそれ以外の負荷とを並列接続した負荷回路を接続した無停電電源装置の電源およびバッテリの容量が大きくなるのを抑制する共に、上記負荷回路を信頼性よく起動する。
【解決手段】 交流電動機負荷9を他の負荷10、11から切り離して電力変換器7の出力を交流電動機負荷9のみに接続する切換を可能にし、負荷回路9〜11を起動時、まず交流電動機負荷9のみに給電して、起動時の突入電流が流れないように徐々にスピードアップさせて起動する。その後、電力変換器7の出力を定格状態として負荷回路9〜11全体に給電する。
(もっと読む)
電力変換装置
【課題】複数電源によるモータ駆動の機能をDC/DCコンバータを用いずに実現するとともに、モータ電力が0、もしくは極めて小さい場合にも、燃料電池からバッテリへの電力移動を実現する小型・低損失な電力変換装置及びその制御技法を提供する。
【解決手段】複数の直流電源10a、10bのそれぞれの出力電圧からパルスを生成・合成することで交流モータ20の駆動電圧を生成し、交流モータ20を駆動する電力変換装置30であって、一方の直流電源から他方の直流電源への充電量を指令する電源電力指令値とモータトルク指令値とモータ回転速度とに基づいてモータ電圧指令値を求めるモータ電圧指令値生成手段と、前記モータ電圧指令値を複数の直流電源に各々対応した電圧指令値を配分する電圧配分手段と、電圧指令値に基づいて電力変換装置の出力電圧パルスを生成するパルス生成手段47とを備える。
(もっと読む)
電動機診断装置
【課題】従来よりも、簡単な構成で精度良く、異常判断が可能な電動機診断装置を提供する。
【解決手段】電動機の各相電流を検出して各相間電流比率を算出し(ST1,ST2)、算出した各相間電流比率と基準値K1と比較し、算出電流比率の方が大きい場合にレアーショート判定する(ST4,ST5)。次に振動センサで電動機の軸受部の振動を検出して振動スペクトラムを作成し(ST5,ST6)、所定周波数のレベル成分が基準値K2より大きい場合に、軸受け損傷判定する(ST7、ST11)。さらに、温度センサで電動機の温度を検出し、検出温度が基準温度K3より大きい場合に、過熱判定する(ST8,ST8,ST12)。
(もっと読む)
交流回転機の制御装置
【課題】 位置或いは速度センサレス交流回転機にあって、円滑で安定した動作特性が得られる交流回転機の制御装置を得ることを目的としている。
【解決手段】 d、q軸電流検出値id,iqにそれぞれ電機子抵抗値Rを乗算して出力する第1、第2のゲイン演算器11、12、回転角速度指令ω*とそれぞれq、d軸推定磁束φq、φdとの積を出力する第1、第2の乗算器13、14、d軸電圧指令vd*に第1の乗算器13の出力を加算し第1のゲイン演算器11の出力を減算して出力する第1の加減算器15、q軸電圧指令vq*に第2の乗算器14の出力を加算し第2のゲイン演算器12の出力を減算して出力する第2の加減算器16、第1の加減算器15の出力の一次遅れ演算を行いd軸推定磁束φdを出力する第1のフィルタ17、および第2の加減算器16の出力の一次遅れ演算を行いq軸推定磁束φqを出力する第2のフィルタ18からなる総磁束推定器5を備えた。
(もっと読む)
モータ制御装置
【課題】
通常の精度のアンプを用いて高精度な電流検出を行うことができ、また、温度が変化しても電流検出精度の劣化がないモータ制御装置を提供する。
【解決手段】
モータ17へ駆動電流を供給するためのスイッチ回路10と、駆動電流を検出するための抵抗7と、抵抗7における両端の電位差を増幅するための増幅回路2と、増幅回路2の入力部に設けられ、電位差を正転または反転させるように切り替える入力部スイッチ手段15と、増幅回路2の出力部に設けられ、増幅回路の出力電圧を正転または反転させるように切り替える出力部スイッチ手段20と、増幅回路2の出力電圧を正転させたときの電圧及び反転させたときの電圧を平均化するCPU50とを備えている。
(もっと読む)
モーター制御装置
【課題】 直流電源にバッテリーなどの回生電力を吸収できる機器を設置せずに、インバーターの直流電源側を過電圧にすることなくモーターの回生運転を行う。
【解決手段】 モーターのトルク指令値と回転速度に応じた逆転用dq軸電流指令値のマップであって、モーターとインバーターで発生する損失がモーターの回生電力よりも大きくなる逆転用dq軸電流指令値のマップを記憶しておき、逆転中のモーターを正転させる場合に、逆転中は逆転用dq軸電流指令値マップからトルク指令値とモーター回転速度とに対応するdq軸電流指令値を読み出し、インバーターによりモーターのdq軸電流がdq軸電流指令値に一致するように電流制御を行う。
(もっと読む)
多相電動機の制御装置
【課題】瞬時値制御手段からPWM制御手段への切り替えを円滑に行なうことのできる多相電動機の制御装置を提供する。
【解決手段】実電流iu,iv,iwに基づき算出される実電流id,iqと指令電流idc,iqcとの差に基づき、PI制御部84,86によりPI制御がなされる。そして、これらの出力は、変換部92によって変換され、最終的な指令電圧vuc,vvc,vwcとなる。PWM制御時には、これら指令電圧となるように制御がなされる。一方、実電流iu,iv,iwと指令電流iuc,ivc,iwcとの差に基づき、瞬時電流値制御がなされる。瞬時電流値制御からPWM制御への切り替えは、3相についての1つずつ順次行なわれる。
(もっと読む)
2,001 - 2,020 / 2,279
[ Back to top ]