
Fターム[5H505JJ10]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | 不感帯を有するもの (15)
Fターム[5H505JJ10]に分類される特許
1 - 15 / 15
モータ制御装置、制御方法及びプログラム
【課題】磁気飽和を回避することにより、モータを安定的に制御する。
【解決手段】d軸電圧Vd或いはq軸電圧Vqの目標増加量が、所定の値以上となったときには、vdリミッタ制御部或いはvqリミッタ制御部によって、信号vd1、及び信号vd2の増加が制限される。これにより、信号vd1、及び信号vd2に示されるリラクタント電圧の増加量及びマグネット電圧の増加量が制限され、モータ90の出力が急峻に変化することがなくなる。
(もっと読む)
可変速駆動装置および給水装置

【課題】インバータ周波数から目標電流を求める演算式を、パラメータを用いて自動生成し、演算式を無数に生成できるようにして多数の機種に適用出来る可変速駆動装置および給水装置を提供する。
【解決手段】インバータ周波数から目標電流を求め、運転電流が目標電流となるよう周波数を制御して間接的に吐出圧力を所定の目標値に制御する方式において、インバータ周波数から目標電流を求める演算式をパラメータを用いて自動生成し、演算式を無数に生成できるようにして多数の機種に適用するとともに、目標電流を更新するタイミングを特定してこれの演算式を正しく生成し、目標電流に不感帯を設けて安定化したことを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の前記操舵系に対する操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備えている。前記相対角度情報補完部は、相対角速度を検出し、検出した相対角速度が少なくとも零近傍の不感帯内となったとき、前記モータ相対角度検出手段により相対角度情報が得られるように前記相対角速度に所定周期毎に符号を変更するオフセット値を加算する相対角速度オフセット処理を行う。
(もっと読む)
電動機制御装置
【課題】電力変換器の電圧が飽和していない状態と飽和した状態で自動切り替えを行い、電圧が飽和しても電動機のトルク制御を一定の応答特性で実現できるようにすること。
【解決手段】d軸電流指令とd軸電流の差、q軸電流指令とq軸電流の差を、それぞれ比例増幅器331、積分増幅器332、積分器333、及び比例増幅器334、積分増幅器335、積分器336に入力し、d軸電圧指令Vd*、q軸電圧指令Vq*を出力する。qd軸非干渉補償器337、dq軸非干渉補償器338は、d軸、q軸の干渉を補償する。出力電圧が飽和していない状態では、不感帯要素33Eを遮断状態としリミッタを導通状態とすることにより、磁束電流とトルク電流の独立した電流フィードバック制御を実現する。また、出力電圧が飽和した状態では、不感帯要素33Eを能動状態としトルク電流をトルク電流指令に追従させ、磁束電流は磁束電流指令への追従を放棄する。
(もっと読む)
駆動装置、駆動方法、及び装置
【課題】簡易な構成でありながら位置決め精度を高められる駆動装置、駆動方法、及び装置を提供する。
【解決手段】駆動装置(1a)は、回転駆動する駆動部(10)と、駆動部(10)の駆動出力軸の回転角度位置を検出し第1の位置情報を生成する第1の位置検出器(31)と、駆動部(10)の駆動出力軸に接続された減速機(20)と、減速機(20)の減速出力軸の回転角度位置を検出し第2の位置情報を生成する第2の位置検出器(32)と、第1の位置情報と前記第2の位置情報とを選択的に用いて駆動部(10)を制御する制御部(100a)と、を備える。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。一方、検出操舵トルクTがフィードバックされ、検出操舵トルクTを指示操舵トルクT*に近づけるように、加算角αが生成される。加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。加算角αは、加算角リミッタ24による制限を受ける。検出操舵トルクTが飽和状態となると、初期化部29により、加算角α等の初期化が行われる。検出操舵トルクTの飽和に応答して初期化が行われたときは、検出操舵トルクTの絶対値が所定のしきい値以下となるまで、初期化処理が禁止される。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差である負荷角θLに応じたアシストトルクTAが発生する。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。角速度演算部27は、三相検出電流IUVWのゼロクロス点間の間隔に基づいて、回転角速度ωを求める。補正部28は、指示操舵トルクT*の変化に応じて回転角速度ωに補正を施す。角速度適応制御部29は、回転角速度ωに基づき、PI制御部33のゲインを変更する。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御する。
【解決手段】切換制御部40は、モータ3の回転角速度ωに応じて第1モードと第2モードとの間で制御モードを切り換える。第1モードでは、仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。第2モードでは、検出操舵トルクTに応じて二相指示電流値Idq*が設定されるとともに、誘起電圧推定部27などの働きによってロータの回転角が推定される。この推定により求められた推定回転角θEを用いてモータ3の制御が行われる。
(もっと読む)
回転電機制御システム及び車両駆動システム
【課題】消費電力が大きい状態においてバッテリの電圧を昇圧して回転電機を駆動させても、バッテリが過電流とならないように消費電力を抑制可能な回転電機制御システムを提供する。
【解決手段】車両を駆動するための回転電機に電力を供給する直流電源と回転電機との間に介在され、少なくとも回転電機が力行する際に直流電源の出力を交流に変換する周波数変換部と、直流電源と周波数変換部との間に介在され、回転電機の目標トルク及び回転速度に応じて設定される昇圧指令値に基づいて直流電源の出力を昇圧する電圧変換部と、周波数変換部及び電圧変換部を制御する制御部とを備え、制御部は、回転電機の消費電力が所定の電力制限値を超えた場合に昇圧指令値の上昇を制限する。
(もっと読む)
回転電機制御システム及び車両駆動システム
【課題】直流電源の出力を昇圧する機能を有した回転電機制御システムにおいて、昇圧の開始時に生じる過渡的な電圧上昇に伴って直流電源に過電流が発生することを抑制する。
【解決手段】直流電源と回転電機との間に介在されて直流電源の出力を交流に変換する周波数変換部と、直流電源と周波数変換部との間に介在されて昇圧指令値に基づいて直流電源の出力を昇圧する電圧変換部と、周波数変換部及び電圧変換部を制御する制御部とを備え、前記回転電機の前記目標トルク及び前記回転速度がそれらの相関関係に基づいて設定された所定の移行境界を越えたことを条件として、制御部が非昇圧制御から昇圧制御へ移行させる制御を行うに際して、移行の際に過渡的に生じる上昇電力を直流電源が出力可能な許容電力から差し引いた電力である昇圧可能電力KSを基準とし、回転電機の消費電力が昇圧可能電力KS以下となる領域に移行境界K3が設定される。
(もっと読む)
モータ制御装置およびそれを備えた車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置およびそれを用いた車両用操舵装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差は負荷角θLである。このとき、ロータ角θMに従う回転座標系であるdq座標のq軸電流はIγ・sinθLとなる。したがって、負荷角θLに応じたアシストトルクTAが発生する。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。これにより、指示操舵トルクT*が得られるように負荷角θLが変化する。
(もっと読む)
モータ制御装置とモータ制御方法
【課題】3相モータのパラメータが変動した際であっても、安定した電流制御を行うことが可能なモータ制御装置を提供する。
【解決手段】3相モータ10の回転子に配設された永久磁石が発生する磁界の方向であるd軸及び前記d軸に直交するq軸の電圧指令値を3相各相の3相電圧指令値に変換し、3相電圧指令値に基づいた制御により3相モータ10を駆動するモータ駆動装置100は、3相各相のモータ電流をPWM制御によって制御するPWM制御部6と、所期の規範モデルに追従させるときの等価入力と切り替え面に拘束させるための制御入力とを決定し、PWM制御の周期と同期してスライディングモード制御を行うスライディングモード制御部5と、を備える。
(もっと読む)
電気駆動装置内のPWM電圧ひずみを低減させるための方法および装置
【課題】電気駆動装置内の低速動作時の電圧ひずみの影響を低減させるための方法および装置を提供すること。
【解決手段】方法は、最小達成可能デューティサイクルと最大達成可能デューティサイクルの間の範囲のデューティサイクルを有する第1の信号を受け取ること、そのデューティサイクルがひずみ範囲内にあり、かつ第1のクリッピング値未満である場合に、最小達成可能デューティサイクルに基づく第2のデューティサイクルを生成すること、そのデューティサイクルがひずみ範囲内にあり、かつ第1のクリッピング値と第2のクリッピング値の間にある場合に、最小パルス幅および最大パルス幅のうち近い方に基づく第2のデューティサイクルを生成すること、そのデューティサイクルがひずみ範囲内にあり、かつ第2のクリッピング値よりも大きい場合に、最大達成可能デューティサイクルに基づく第2のデューティサイクルを生成すること、および第2のデューティサイクルを有する第2の信号を、電圧源インバータに送出することを含む。
(もっと読む)
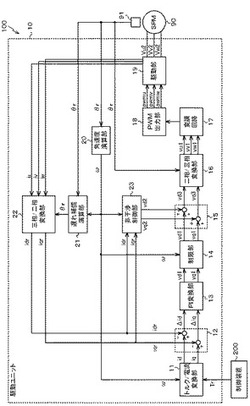
交流励磁発電電動機の制御装置
【課題】交流電力系統の事故などによる直流回路の電圧変動が発生しても、それを抑制して運転継続することが可能な交流励磁発電電動機の制御装置を提供する。
【解決手段】発電電動機2を交流励磁発電電動機として動作させるため、第1の電力変換器4と、その直流端子に接続された直流コンデンサ6と、交直変換を行って発電電動機2を励磁する第2の電力変換器5と、第1の電力変換器4用の第1の制御回路20と、第2の電力変換器5用の第2の制御回路30とで構成し、第1の制御回路20は、直流電圧が指令値に一致するように第1の電力変換器4の有効電力を調節し、第2の制御回路30は、発電電動機2の2次電流が指令値に一致するように第2の電力変換器5の交流端子電圧を調節し、且つ2次電流の変動成分に応じて、直流コンデンサの両端の電圧変動を抑制するように第2の電力変換器5の交流端子電圧を補正制御する。
(もっと読む)
電動機駆動システムの制御装置および制御方法
【課題】電動機をインバータ駆動する電動機駆動システムにおいて、コイル巻線間の層間絶縁破壊に至る部分放電の発生を防止するようにインバータ動作を制御する。
【解決手段】スイッチング素子Q1〜Q6のスイッチング動作によりインバータ20が発生する交流電圧は、モータジェネレータ20の各相コイル巻線21U、21V,21Wに印加される。デッドタイム生成回路50は、湿度センサ26の検出値に応じて設定される制御信号DTSに応じて、高湿度時にはデッドタイムを通常時よりも長く設定する。これにより、高湿度時には、表面電荷が拡散できる時間をより長く確保できるので、上記極性反転時にコイル巻線のギャップに表面電荷によって生じる電界を相対的に弱くすることができる。この結果、表面電荷による電界がギャップ電圧を強めて部分放電が発生しやすくなるような状況を防止できる。
(もっと読む)
1 - 15 / 15
[ Back to top ]