
ジーエム・グローバル・テクノロジー・オペレーションズ・インコーポレーテッドにより出願された特許
1 - 10 / 221
ナノ粒子を含む被覆を有する燃料電池部品
【課題】燃料電池のバイポーラプレートフローチャンネル内の蓄積水を空気コンプレッサーなどの動力を用いず、また導入加湿を低下させることなく掃去すること。
【解決手段】燃料電池のバイポーラプレートと、バイポーラプレートフローチャネルの少なくとも一部上に親水性の側鎖を有するナノ粒子を含む親水性被覆を形成する。ナノ粒子は2〜100nmの範囲の寸法を有し、親水性の側鎖は、アミノ基、スルホネート基、スルフェート基、スルファイト基、スルホンアミド基、スルホキシド基、カルボキシレート基、ポリオール基、ポリエーテル基、ホスフェート基、又はホスホネート基の少なくとも一つを含む。
(もっと読む)
燃料電池ならびに起動および停止サイクル中の電極性能低下を軽減する方法
【課題】多数の起動および停止サイクルの後における電極の性能低下が最小限である燃料電池を提供すること。
【解決手段】本発明の一実施形態は、第1の面および第2の面を有する電解質膜と、第1の面の上のアノードおよび第2の面の上のカソードとを備え、アノードがカソードの触媒担持の50%未満の触媒担持を有する製品を含む。
(もっと読む)
ロボットグリッパーで物体を扱うことに関するシステム及び方法

【課題】グリップ条件や掴まれる物体の振る舞いを決定し、その物体の振る舞いに基づいてグリッパーを制御する。
【解決手段】グリッパーで物体を扱うことに関するシステムは、グリッパーにより扱われる物体の位置を表す空間分布データを測定するように構成されたセンサを備えている。システムは、物体の振る舞いを決定するように構成された計算ユニットを更に備えている。
(もっと読む)
燃料電池電極において触媒担体腐食を緩和するための犠牲材料の使用
【課題】アノードでの局所H2枯渇及びセルリバーサルに対してより耐性を有する改良された膜電極アセンブリを提供する。
【解決手段】燃料電池は、アノード層32と、アノード層上に配置されたポリマー性イオン伝導膜と、ポリマー性イオン伝導膜上に配置されたカソード層38と、カソード層、アノード層、又はその両方における担体炭素よりも速い速度で腐食する有効量の反応性材料と、を含む。反応性材料はカソード触媒層に近接するか又はカソード触媒層内に分配される。変形例において、反応性材料はアノード層にも近接する。
(もっと読む)
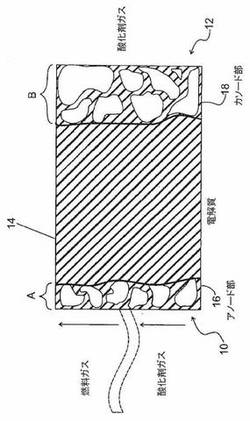
燃料電池の層のための添加物
【課題】燃料電池電解質膜および電極の性能と耐久性を高めるイオノマー組成物を提供する。
【解決手段】第一イオノマー及び添加物を含む第一層12を含んでなる燃料電池であって、該添加物はCe、Mn、V、Pt、Ru、Zr、Ni、Cr、W、Co、Mo、又はSnの少なくとも1の酸化物を含む金属酸化物を含み、該添加物は該イオノマーの少なくとも0.1wt%にて存在する製品が一態様として開示される。金属酸化物の1又は全てが本質的にナノ粒子からなる場合には、性能と耐久性が向上する。
(もっと読む)
疎水性の拡散媒体を備えた燃料電池
【課題】PEM燃料電池で使用するための疎水性特性を向上させた拡散媒体を提供する。
【解決手段】拡散媒体34,36,38,40は、多孔性伝導性基質と、該基質に付着された第1の疎水性フルオロカーボンポリマーコーティングと、該基質に付着された疎水性シリコンポリマーを含む第2のコーティングとから作られる。該基質は、好ましくは、カーボンファイバーペーパーであり、疎水性フルオロカーボンポリマーは、PTFE又は類似のポリマーであり、シリコンは湿気硬化性を有する。
(もっと読む)
乗員拘束システム
【課題】車両のコンソールと車両の座席システムとの間に展開し、着座乗員によってエアバッグ袋体にかけられた力にコンソールが対抗するようにすることで着座乗員に対して改善された拘束をもたらす。
【解決手段】コンソールに隣接して乗員に着席を提供するよう構成された座席システム40を有する自動車のための乗員拘束システム50であって、折りたたまれた状態で格納され、乗員35に隣接して膨張し、乗員35を拘束する膨張室53を有する袋体51と、膨張室53を膨張させるインフレータとを備える。袋体51の底部はコンソール33の上面より下の位置で展開し、袋体53の上部はコンソール33の上面より上の位置で展開する。乗員35の負荷時は、袋体53の一部がコンソール33と接触して横方向の支持を受け、袋体53に衝突する乗員からかかる力に対抗する。この横方向の支持により、袋体53の横方向の移動が妨げられ、乗員35をさらに拘束できる。
(もっと読む)
1つ以上の人間型ロボットの同時経路検討
【課題】複数の独立する課題を備える協働作業課題を実行するためのロボットシステムを提供すること。
【解決手段】ロボットシステムは、複数のロボットジョイントを有し、ロボットジョイントの各々は、協働作業課題の実行中に独立に制御可能であり、ロボットシステムはさらに、協働作業課題の実行中に前記ロボットジョイントの運動を制御するコントローラを有し、コントローラは、自動的に、ロボットジョイントを課題に特化したサブシステムにグループ化し、課題実行分岐部に到達した際に複数の独立した課題を課題に特化したサブシステムに割り当て、前記課題実行分岐部に到達した後に、課題に特化したサブシステムの、課題に特化したそれぞれのサブシステムによる独立した実行を調整する様に構成した。
(もっと読む)
エアバッグ装置
【課題】展開時に、前記エアバッグ袋体と乗員との間に接触することで、乗員に対して有効な拘束をもたらすとともに、エアバッグ袋体の展開軌跡を制御する。
【解決手段】車両の乗員に対して拘束をもたらすために膨張するように形成された、シート組立体40の一部に設けられた拘束装置(エアバッグ装置)50であって、エアバッグ袋体60は膨張部位61と、少なくとも1個の非膨張部位62を有している。エアバッグ袋体60には膨張部位61を膨張させるガスを供給するインフレータが取り付けられている。エアバッグ袋体60と接続された第1端部及び第2定着端を有するテザー80を有する。エアバッグ袋体60は少なくとも1個の非膨張部位62内に少なくとも1個の開口69を有し、テザーの一部69は開口62を通過する。
(もっと読む)
器用なロボットの多軸ロードセルを較正する方法および装置
【課題】ロボットハンド内のロードセルを自動較正すること。
【解決手段】ロボットジョイントA,B,C,D,E,Fと、対応するジョイントの1つにおいてジョイント角度を測定するように構成された角度センサ15と、ロボット10の所定の姿勢の間に、ロードセル18の対応する1つに付与されるひずみ値のセットを測定するためのロードセルと、を備える。ホストマシン32は、ロードセルおよび角度センサに電気的に接続され、所定の姿勢の間にジョイント角度値およびひずみ値を受け取る。ロボットは、ロードセルの係合ペアを互いに圧して所定の姿勢を形成する。ホストマシンは、ジョイント角度およびひずみ値を処理するアルゴリズムを実行し、力バランス方程式内の誤差を最小化する全ての較正マトリックスのセットから、予め特定された値に最も近い較正マトリックスのセットを選択する。また、アルゴリズムを介してロードセルを較正する方法が提供される。
(もっと読む)
1 - 10 / 221
[ Back to top ]