
ザ・ユナイテッド・ステイツ・オブ・アメリカ・アズ・リプレゼンテッド・バイ・ジ・アドミニストレーター・オブ・ザ・ナショナル・エアロノーティクス・アンド・スペース・アドミニストレーションにより出願された特許
1 - 10 / 27
ロボット制御インターフェイスの動的最適化のための方法
【課題】コントローラ内にデータを入力し、かつ/またはロボットシステムを制御するための制御インターフェイスを、人間−機械インターフェイスデバイス上に表示すること。
【解決手段】表示される制御インターフェイスの特定の構成は、実施される作業、ロボットシステムの性能、人間−機械インターフェイスデバイスの性能、およびユーザの専門知識のレベルに基づく。制御インターフェイスの特定の構成は、上記の基準に基づいて、ユーザとロボットシステムの間の相互作用を最適化するように設計される。
(もっと読む)
シリアルロボットのための迅速な把持接触計算

【課題】ロボットフィンガに要求される把持接触情報を迅速に計算するシステムを提供する。
【解決手段】このロボットは、命令された把持姿勢に応答して、三次元(3D)物体を把持することができる。コントローラは、入力情報を受け取る。入力情報は、命令される把持姿勢、ロボットの運動学を記述する情報の第1セット、把持される物体の位置を記述する情報の第2セットを含む。また、コントローラは、命令された把持姿勢を達成するために、シリアルロボットに必要とされる、二次元(2D)面において、シリアルロボットと3D物体の表面との間の接触ポイントのセットを計算する。2D面において、接触ポイントのセットを用いて、リンクのペアの間の必要とされるジョイント角度が計算される。必要とされるジョイント角度を用いてシリアルロボットの運動に関する制御動作が実行される。
(もっと読む)
ステージクラス化を用いた器用なロボットの実行シーケンスを制御するための方法およびシステム
【課題】ステージクラス化を用いた器用なロボットの実行シーケンスを制御する。
【解決手段】ロボットは、複数のロボットジョイントと、ジョイントを運動させるアクチュエータと、ジョイントの特性を測定し、センサ信号として特性を伝達するセンサと、を有する。コントローラは、センサ信号を受け取り、メモリからの命令を実行し、状態クラス化モジュールを介してセンサ信号を識別できるクラスにクラス化し、クラスを用いてロボットのシステム状態を監視し、システム状態に基づいて、代替作業タスクの実行においてロボットを制御するように構成される。上述のシステム内のロボットを制御する方法は、コントローラから信号を受け取ること、状態クラス化モジュールを用いて信号をクラス化すること、クラスを用いてロボットの現在のシステム状態を監視すること、現在のシステム状態に基づいて代替作業タスクの実行においてロボットを制御すること、を含む。
(もっと読む)
通信システムおよび方法
【課題】帯域幅が制限されるネットワーク通信のために最適化される通信システムおよびプロトコルを提供すること。
【解決手段】高遅延、低帯域幅ネットワークを通じて通信するための通信システムは、ローカルシステムからデータの集合を受信するように構成される通信プロセッサ、および通信プロセッサと通信する送受信機を含む。送受信機は、複数の通信パラメータにしたがって、ネットワークを通じてデータを送受信するように構成される。通信プロセッサは、データの集合を複数のデータストリームに分割し、個々のデータストリームの重要性を反映する優先度のレベルを、個々のデータストリームのそれぞれに割り当て、少なくとも1つのデータストリームの優先度にしたがって、複数のデータストリームのうちの少なくとも1つの通信パラメータを変更するように構成される。
(もっと読む)
ロボット駆動テンドンに張力を付与するためのシステムおよび方法
【課題】ワイア駆動において、高張力を少ない電力で実現すること。
【解決手段】テンドン張力付与システムは、近位端および遠位端を備えるテンドンと、アクチュエータと、モーターコントローラとを含む。アクチュエータは、ドライブスクリューおよびモーターを含むことができ、また、テンドンの近位端に連結され、電流に応答してテンドンに張力を付与するように構成される。モーターコントローラは、アクチュエータに電気的に連結され、テンドンにストール張力が達成されるまで、第1の大きさを備える電流をアクチュエータに提供するように構成される。また、モーターコントローラは、ストール張力の達成に続いてアクチュエータにパルス電流を提供するように構成される。パルス電流の大きさは、第1の大きさよりも大きい。モーターコントローラはさらに、パルス電流の終了に続いて、モーターを安定状態保持電流に戻すように構成される。
(もっと読む)
力および位置ベースの制御法則を用いたテンドン駆動ロボットフィンガのロバスト操作
【課題】ロボットフィンガのロバスト操作を提供する。
【解決手段】テンドン駆動フィンガ14および制御システム12であって、張力センサが利用可能なときは力ベース制御法則を介してフィンガを制御し、センサが利用可能でないときは、位置ベース制御法則を介してフィンガを制御する。多数のテンドンは、それぞれ対応するセンサを備え、選択的に位置ベース制御法則にコンプライアンス値を注入する。制御プロセスは、ホストマシンにより実行され、力ベース制御法則または位置ベース制御法則を介してフィンガを制御する。フィンガを制御する方法は、張力センサの利用可能性を決定するステップを含み、力ベース制御法則または位置ベース制御法則を使用して選択的にフィンガを制御するステップを含む。位置制御法則は、制御システムが外乱に抵抗することを可能にし、一方で、内部のテンドン張力を名目的に初期状態に維持することを可能にする。
(もっと読む)
力またはインピーダンス制御ロボットの作業空間安全動作
【課題】構造化されていない作業空間内で、外部物体に対する押圧力を制限するロボット制御方法を提供する。
【解決手段】マニピュレータから周囲の環境に付与される静的な力に上限を課す。また、構造化されていない作業空間におけるマニピュレータと物体との間の接触力を決定することを含むことができ、また、この接触力が閾値を超えるときに動的反射作用を実行することを含むことができ、それにより上限が制限された静的な力により対処されない慣性衝撃を緩和する。この方法は、ジョイントアクチュエータによりロボットジョイントに付与される必要な反射作用トルクを計算することを含むことができる。コントローラは、力ベースまたはインピーダンスベースの命令を用いてマニピュレータを制御する。
(もっと読む)
速度制御ロボット機構におけるワークスペース制限の応用
【課題】作業スペース限界で、滑らかな安定した動作を行う。
【解決手段】速度制御信号に応答し、凸多角形境界により画定される許容される作業スペースを備え、ホストマシンは、境界に対する、機構上の参照ポイントの位置を決定する。ホストマシンは、位置の関数として速度制御信号を自動的に形成することで境界を守らせるためのアルゴリズムを含む。それにより、境界のエッジおよび角部に沿って、機構の滑らかな乱れのない動作を提供する。このアルゴリズムは、高い速度、および/または、外力が存在する用途に適している。ホストマシンは、参照ポイントの位置の関数として速度制御信号を形成することにより境界を守らせるアルゴリズムを含み、また、このアルゴリズムを実行するハードウェアモジュールを含む。また、凸多角形境界を守らせるための方法が提供され、この方法は、ホストマシンを介して、参照ポイントの位置の関数として速度制御信号を形成する。
(もっと読む)
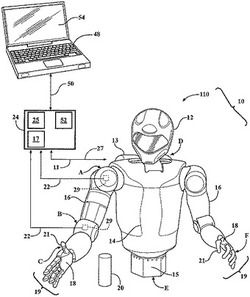
器用なロボットの多軸ロードセルを較正する方法および装置
【課題】ロボットハンド内のロードセルを自動較正すること。
【解決手段】ロボットジョイントA,B,C,D,E,Fと、対応するジョイントの1つにおいてジョイント角度を測定するように構成された角度センサ15と、ロボット10の所定の姿勢の間に、ロードセル18の対応する1つに付与されるひずみ値のセットを測定するためのロードセルと、を備える。ホストマシン32は、ロードセルおよび角度センサに電気的に接続され、所定の姿勢の間にジョイント角度値およびひずみ値を受け取る。ロボットは、ロードセルの係合ペアを互いに圧して所定の姿勢を形成する。ホストマシンは、ジョイント角度およびひずみ値を処理するアルゴリズムを実行し、力バランス方程式内の誤差を最小化する全ての較正マトリックスのセットから、予め特定された値に最も近い較正マトリックスのセットを選択する。また、アルゴリズムを介してロードセルを較正する方法が提供される。
(もっと読む)
直列弾性アクチュエータの力およびインピーダンスのロバスト制御のための構成
【課題】力誤差を計算することなく、または、直接的に弾性SEA素子をひずみゲージで測定することなく、SEAにより付与されるトルクを制御するためのSEA構成に関する。
【解決手段】SEA構成30は、弾性バネ36の一端部に連結されるモーター32と、弾性バネの反対側の端部に連結される負荷38とを有する。モーターはバネを通じて負荷を駆動する。モーターのシャフトおよび負荷の向きは、位置センサにより測定される。位置センサからの位置信号は、埋め込みプロセッサ44に送られ、モーターシャフトに対する負荷の向きを決定し、バネ上のトルクを決定する。埋め込みプロセッサは、リモートコントローラ46から参照トルク信号を受け取る。埋め込みプロセッサは、所望のジョイントトルクについて高速サーボループを動作させる。リモートコントローラは、インピーダンスまたは位置決め目標物により高次の目標物に基づいてジョイントトルクを決定する。
(もっと読む)
1 - 10 / 27
[ Back to top ]