
Fターム[5H505MM14]の内容
交流電動機の制御一般 (51,584) | 保護、補償、監視、表示、防止 (2,003) | 温度補償 (36)
Fターム[5H505MM14]に分類される特許
1 - 20 / 36
電流検出装置
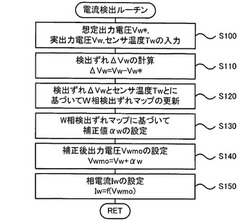
【課題】回路に流れる電流をより適正に検出できるようにする。
【解決手段】電流センサから出力されるべき電圧としての想定出力電圧Vw*に対する電流センサからの実出力電圧Vwのズレ量としての検出ずれΔVwとセンサ温度Twとに基づいてW相検出ずれマップのヒストグラムを更新し(S120)、更新したヒストグラムでの最大頻度検出ずれに基づいて補正値αwを設定し(S130)、設定した補正値αwを実出力電圧Vwに加えて求めた補正後出力電圧Vwmoを電流値に変換することによってW相の相電流Iwを算出する(S140,S150)。
(もっと読む)
モータ駆動システム

【課題】電力変換器に零電圧ベクトルを出力させて二次電池を充電する際に、モータ温度に応じて充電電流を制御し、モータの故障を防止する
【解決手段】電力変換器20,30により駆動される交流モータ40,50の中性点と直流リンク部の一端との間に接続された二次電池60と、電力変換器20とモータ40との間のスイッチ12と、電力変換器20の交流側とスイッチ12との間の交流電源10と、スイッチ12をオフにした状態で電力変換器20を整流器動作させて直流リンク部のコンデンサ14に直流電力を蓄積し、かつ、電力変換器30を動作させてモータ50をリアクトルとして利用しつつ直流リンク部の直流電力により二次電池60を充電するための制御装置70と、モータ50の温度検出器18と、を備え、制御装置70が、温度検出器18による温度検出値に応じて二次電池60の充電電流を制御する。
(もっと読む)
圧縮機モータの予熱制御装置
【課題】圧縮機モータの巻線抵抗が相毎に異なる場合や圧縮機の内部温度が不均等である場合でも、圧縮機の内部を正確かつ均等に予熱を行う。
【解決手段】本発明の予熱制御装置は、各相の巻線抵抗を算出する巻線抵抗演算手段12と、各相の巻線温度を算出する巻線温度演算手段13と、各相の巻線温度に応じた電流指令を算出する電流指令演算手段14と、電圧指令を演算する電圧指令演算手段15と、それらを制御するシーケンス制御手段とを備える。これにより各相の巻線温度に応じて電流指令を変化させて圧縮機の内部を正確かつ均等に予熱を行う。
(もっと読む)
永久磁石型三相交流電動機の制御装置
【課題】出力トルクが間欠的に変化する永久磁石型三相電動機を駆動するインバータに搭載されているパワー半導体スイッチの温度変化幅を小さくしてサーマルサイクルによる熱劣化を防止する。
【解決手段】永久磁石型三相電動機を駆動するインバータに与えられるトルク指令が小さくトルク分電流であるq軸電流が小さい場合には、磁束分電流でありマイナスの値を有するd軸電流を増加させ、またトルク指令が大きくトルク分電流であるq軸電流が大きい場合には磁束分電流でありマイナスの値を有するd軸電流を減少させるd軸電流指令演算器を具備し、パワー半導体スイッチに流れる電流となるq軸電流とd軸電流のベクトル和が一定の所定値となるようにしてパワー半導体スイッチで生じる導通損失を一定とすることでパワー半導体スイッチの温度を一定に保つ。
(もっと読む)
インバータ装置
【課題】スイッチング素子の温度が基準温度を超えたことによりキャリア周波数を低下させる場合において、キャリア周波数の低下量を制限し、安定的に電動機の制御を行うことができるインバータ装置を提供することを目的としている。
【解決手段】スイッチング素子であるパワートランジスタ23a〜23fの温度を温度検出回路27で検出して、温度比較回路28で基準温度T1およびT2(T1>T2)と比較し、基準温度T1を超えたときに、周波数制御回路29が電流検出回路25の検出電流と温度検出回路27の検出温度に応じて算出される量だけキャリア周波数を低下させる。その後、パワートランジスタ23a〜23fの温度が基準温度T2を下回ったときに、周波数制御回路29はキャリア周波数を予め設定された初期値のキャリア周波数に戻す。
(もっと読む)
インバータ駆動装置
【課題】シャント抵抗には温度特性があるため、高温時などには実際の電流値と検出電流値にずれがでるという課題があった。本発明は、インバータ回路において、シャント抵抗の温度特性を考慮して検出電流値の精度を向上させるものである。
【解決手段】シャント抵抗の温度特性値を含めて検出電流値の補正を行うことでシャント抵抗が高温になっても電流検出を精度良く行うことを実現できようにし、より精度の高い制御を行うことが可能なインバータ駆動装置を提供することができる。
(もっと読む)
モータ用駆動回路及びそれを備えたモータ
【課題】電流値ではなく回転子の回転位置に基づいて該回転子の回転制御を行う構成において、最適な進角値を設定可能な構成を簡単且つ低コストで実現する。
【解決手段】固定子に対して回転可能に設けられた回転子の回転位置を検出する回転位置検出部(位置検出素子14)と、上記固定子に流す電流の位相を補正するための進角信号を生成する進角制御部(進角信号生成部25及び進角入力電圧調整部31)と、上記回転位置検出部によって検出された回転位置、上記回転子の回転速度を制御するための制御信号(速度指令電圧Vsp)及び上記進角信号に基づいて、モータを駆動させるための出力信号(通電信号)を生成する出力信号生成部(タイミング制御部23)と、を備えた構成とする。そして、上記進角制御部を、上記制御信号に応じて上記進角信号を設定するように構成する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】加算角補正部25は、モータ推定温度が第1の所定温度以上となると、インターバル時間毎に、加算角リミッタ24から出力される加算角αの絶対値を一時的に低減させる。また、加算角補正部25は、インターバル時間を、モータ推定温度が高いほど短くする。そして、インターバル時間が所定のしきい値以下になると、すなわち、モータ推定温度が第1の所定温度より高い第2の所定温度以上となると、加算角補正部25は、指示電流値変更部31に電流停止指令を通知する。これにより、γ軸指示電流値Iγ*が零にされ、操舵モードがマニュアルステアモードとなる。
(もっと読む)
電動機制御装置
【課題】 従来の電動機の電流検出装置は、電流検出手段を構成する回路素子の特性バラツキおよび温度特性に依存して生じるオフセットの両者を含むオフセットを補正することができるが、その分オフセット補正値の取り得る値が大きく、誤学習してしまう問題があった。また電流検出処理において得られたオフセット補正値はメモリに格納して記憶しておくが、メモリが破損した際、取り得る値が大きいオフセット補正値は初期化されるため、その変化幅は大きく、メモリ破損時の電動機への影響も大きいという問題があった。
【解決手段】 オフセット補正に基づく電動機の電流検出装置において、オフセット補正値は、電動機組立時に、不揮発メモリに記憶される第1のオフセット補正値と電動機を駆動中に、揮発メモリに記憶される第2のオフセット補正値からなるように構成する。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】モータ駆動電圧算出時のパラメータに発生するノイズを抑制し、モータをより安定的に駆動する。
【解決手段】オープンループ制御部22は、dq軸上の指令電流id*、iq*とモータの角速度ωe に基づき、モータの回路方程式に従いdq軸上の指令電圧vd 、vq を求める。dq軸/3相変換部23は、指令電圧vd 、vq を3相の指令電圧に変換する。R算出部26は、q軸指令電圧vq と電流センサ14で検出した電流値ia と角速度ωe に基づき、モータの回路方程式に含まれる電機子巻線抵抗を含む回路抵抗Rを求める。R平滑部27はR算出部26で求めたR値に対して平滑化処理を行い、オープンループ制御部22は指令電圧vd 、vq を求めるときに平滑化されたR値を使用する。モータの回路方程式に含まれる電機子巻線鎖交磁束数Φを求めるときにも、同様の平滑化処理を行う。
(もっと読む)
PMモータ駆動装置の電流リミット値設定方法
【課題】PMモータの駆動装置において、磁石温度の変化によって電流リミットにかかることを抑制し、一定のモータ出力を継続させる。
【解決手段】PMモータ3の電流が電流リミット値以上の場合に、そのPMモータ3の電流を保護回路5において制限するPMモータ駆動装置の電流リミット値設定方法において、前記保護回路5が、PMモータ3の予備運転時に、PMモータ3の磁石温度変化に伴う電圧,電流の増減をテーブルシート化し、そのテーブルシートに基づき各磁石温度における電流リミット値を算出して記憶し、PMモータ3の運転時に、PMモータ3の磁石温度を取得し、予備運転時に記憶した各磁石温度における電流リミット値から、運転時に取得した磁石温度における電流リミット値に自動修正する。
(もっと読む)
自動変速機の制御装置
【課題】電動機の駆動開始直後のトルクを瞬時に補正することができ、コイル温度が変化しても駆動開始直後(過渡時)のギア動作を適切に補正することが可能となる変速機の制御装置を提供する。
【解決手段】ギアチェンジ終了判定手段と、電動機停止判定手段と、変速開始前の停止中の電動機に所定電圧を印加する状態と印加しない状態を所定間隔で交互に繰り返し前記電動機のコイル抵抗を推定するコイル抵抗推定手段を備え、前記ギアチェンジ終了判定手段と電動機停止判定手段とにより電動機が停止していると判断した場合に、変速開始前の電動機停止中に、前記コイル抵抗推定手段によって算出したコイル抵抗値に応じて変速開始後の前記電動機に印加する指令電圧の初期値を所定期間において補正するようにした。
(もっと読む)
モータ駆動方法およびその装置
【課題】特別にバラツキの少ない回路を採用しなくても、零レベルの変化の影響を排除して精度の高いロータ位置の検出を達成する。
【解決手段】モータ電流の検出値を補正するために、モータを駆動しない期間中に、インバータの上アームのスイッチングトランジスタを全てオフにしてかつインバータの下アームのスイッチングトランジスタを全てオンにするか又は、インバータの上アームのスイッチングトランジスタを全てオンにしてかつインバータの下アームのスイッチングトランジスタを全てオフにして、インバータから零ベクトルを出力して、モータ電流を検出する検出手段からの出力を零レベルとして検出する。
(もっと読む)
モータ制御装置
【課題】コストの大幅な増加を伴うことなく、回転角検出手段の故障時に正確に推定された回転角を用いてモータを適切に駆動することができるモータ制御装置を提供する。
【解決手段】レゾルバ2に故障が生じていない通常時はレゾルバ2が検出する検出回転角θSを用いてモータ1が制御される。レゾルバ2に故障が生じたときは、回転角推定部31が演算する推定回転角θEを用いてモータ1が制御される。レゾルバ2が正常なときに、検出回転角θSから求めた回転角速度ωから検出誘起電圧ESαβが演算される。また、二相電圧指令値Vαβおよび二相検出電流Iαβに基づいて推定誘起電圧EEαβが演算される。これらの比較に基づき、推定誘起電圧EEαβを補正するための補正値Cαβが生成され、補正値記憶部30に書き込まれる。回転角推定部31は、推定誘起電圧EEαβを補正値Cαβで補正し、この補正後の推定誘起電圧を用いて推定回転角θEを求める。
(もっと読む)
電動機の制御装置
【課題】2重ロータを有する電動機の通電制御を、ロータ角度を検出するセンサを設けることなくロータ角度の推定値に基づいて行なうときに、ロータ角度の推定精度を高めることができる電動機の制御装置を提供する。
【解決手段】電動機1の誘起電圧定数の指令値Ke_cと、電動機1の通電量Id_s,Iq_sとに基いて、d軸インダクタンス推定値Ld_e,q軸インダクタンス推定値Lq_eを算出するインダクタンス推定値算出部91aと、電動機1に対するd軸電圧指令値Vd_c,q軸電圧指令値Vq_cと、d軸電流検出値Id_s,q軸電流検出値Iq_sと、インダクタンス推定値算出部91aにより算出されたd軸インダクタンス推定値Ld_e,q軸インダクタンス推定値Lq_eとに基いて、電動機1のロータ角度推定値θm_eを算出するロータ角度推定値算出部92aとを備える。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】モータ駆動電圧算出時のパラメータが変動しても、高い精度でモータを駆動できるようにする。
【解決手段】角度算出部24はロータの角度θを求め、角速度算出部25はロータの角速度ωe を求める。指令電流算出部21は、操舵トルクTと車速Sに基づき、dq軸上の指令電流id*、iq*を求める。補正電圧算出部26は、dq軸上の指令電流id*、iq*と電流センサ14で検出される検出電流id、iqとの偏差に比例ゲイン等を乗算し補正電圧Δvd 、Δvq を算出する。オープンループ制御部22は、指令電流id* 、iq* と角速度ωe に基づき、モータの回路方程式に従いdq軸上の指令電圧vd 、vq を求め、補正電圧Δvd 、Δvq を加算した値を指令電圧vd 、vq とする。dq軸/3相変換部23は、指令電圧vd 、vq を3相の指令電圧に変換する。この指令電圧により回路方程式のパラメータが変動しても、高い精度でモータを駆動できる。
(もっと読む)
モータ駆動システムおよびその制御方法ならびに電動車両
【課題】交流電動機の磁石温度と、電力変換ユニットの温度との関係を適切化するようにインバータのスイッチング周波数(キャリア周波数)を制御することによって、電力変換ユニットの機器保護を図る。
【解決手段】磁石温度推定部300は、モータ温度(磁石温度)推定値Tm♯を算出する。基準温度設定部320は、コンデンサ温度取得部310によって取得されたコンデンサ温度Tcおよび、コンデンサ耐圧およびモータ無負荷誘起電圧の特性に従って、基準温度Thを設定する。キャリア周波数設定部330は、Tm♯≧Thのときには、通常マップ332に従ってインバータのキャリア周波数を設定する一方で、Tm♯<Thのときには、モータ昇温制御時マップ332に従って、通常時よりもキャリア周波数を低くする。これにより、モータ電流のリップル電流を大きくすることにより、渦電流増大させてモータ温度上昇を促進する。
(もっと読む)
電動オイルポンプ用モータ制御装置
【課題】モータ制御に速度制御、または、トルク制御を用いた場合において、油温が変化した場合でも、電動オイルポンプが必要とするモータの回転速度とトルクとなるように制御できる電動オイルポンプ用モータ制御装置を提供することにある。
【解決手段】油圧ポンプシステムは、電動オイルポンプ1を駆動するブラシレスモータ2と、ポンプ油圧回路の油温を検出する温度センサ12と、ブラシレスモータ2に対するq軸電流指令を出力する制御指令発生手段31を有するモータ制御手段3とを有する。制御指令発生手段31は、モータトルク指令値及び油温情報に基づいて、ブラシレスモータのモータトルクを制御するとともに、ブラシレスモータ2のモータ回転速度を制限し、または、モータ回転速度指令値及び油温情報に基づいて、ブラシレスモータ2のモータ回転速度を制御するとともに、ブラシレスモータ2のモータトルクを制限する。
(もっと読む)
モータ制御装置
【課題】モータパラメータを正確に同定することによってロータ回転位置の推定精度を向上する。
【解決手段】マイクロコンピュータ7は、パラメータ同定のための参照信号を生成する参照信号生成部23と、二相指示電圧Vαβと二相検出電流Iαβとに基づいてモータパラメータを同定するパラメータ同定部22と、同定されたモータパラメータに基づいてロータの回転位置を推定する位置推定部21とを備えている。パラメータ同定部22は、補償項を導入したモータモデルv=(R+pL)i+ε(ただし、vはモータに印加される電圧、Rはステータ巻線抵抗、Lはモータのインダクタンス、pは微分演算子、iはモータ電流、εは電流応答に依存しない補償項)に基づいてモータパラメータを同定する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】電動パワーステアリング装置の制御装置において、温度環境の変化に起因する実質的なデッドタイムの変動を抑制し、トルクリップルの発生を抑止すること。
【解決手段】電流指令値を入力とする電流制御部48と、インバータ回路66の制御に必要なPWM信号を生成するPWM信号生成部56と、電流指令値に基づきPWM信号に設けられたデッドタイムによる影響を抑制するための補償電圧を生成して出力するデッドタイム補償部46と、電流制御部48からの電圧指令値とデッドタイム補償部46からの補償電圧とに基づいてPWM信号生成部56に付与する指令DUTYを決定する指令DUTY決定部50と、インバータ回路66に具備されるスイッチング素子の温度または周辺温度を検出した検出温度に基づきPWM信号生成部56に付与されているデッドタイム指定値を補正するデッドタイム補正部54と、を備える。
(もっと読む)
1 - 20 / 36
[ Back to top ]