
Fターム[5H505MM17]の内容
交流電動機の制御一般 (51,584) | 保護、補償、監視、表示、防止 (2,003) | 検出誤差の補償 (115)
Fターム[5H505MM17]の下位に属するFターム
軸の偏心、軸のねじれによるもの (1)
回転検出器によるもの (31)
Fターム[5H505MM17]に分類される特許
1 - 20 / 83
回転機の制御装置
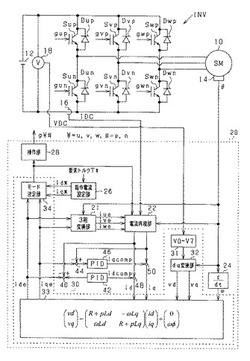
【課題】電流センサの出力値に実際の電流の振幅に対して所定の比率(≠1)だけ相違する誤差であるいわゆるゲイン誤差が含まれる場合、これに起因してモデル予測制御の制御性が低下するおそれがあること。
【解決手段】偏差算出部40,44では、予測電流ide,iqeのそれぞれと同位相の実電流id,iqとの差が算出される。フィードバック制御部42,46のそれぞれでは、偏差算出部40,44の出力値をゼロにフィードバック制御するための操作量(補償量idcomp,iqcomp)が算出される。これら補償量idcomp,iqcompによって、予測部33によって予測される予測電流ide,iqeが補正される。
(もっと読む)
初期補正機能を有するモーター駆動装置及び方法

【課題】本発明は、初期補正機能を有するモーター駆動装置及び方法に関する。
【解決手段】本発明の一実施形態によるモーター駆動装置は、モーターの駆動電流を提供するインバーターを介して当該モーターに流れる駆動電流に対応する電圧を検出する電流検出部と、当該電流検出部によって検出された検出電圧のピーク値を検出するピーク値検出部と、当該ピーク値検出部からの検出電圧をデジタル信号に変換するA/D変換部と、上記モーターの駆動開始時点から既設定された時間までの初期駆動区間に当該モーターを駆動させて上記A/D変換部からのデジタル信号に基づいて当該モーターの駆動電流のオフセットを補正する駆動制御部と、を含むことができる。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10を流れる電流の検出値をフィードバック制御するための操作量としての指令電圧の1電気角周期に渡る積分値をゼロにフィードバック制御する場合、電気角の検出値に誤差が生じることで、電流の検出値に重畳されたオフセット誤差を適切に補正できないこと。
【解決手段】モデル予測制御部30では、モデル予測制御によってインバータINVの今回の操作状態を表現する電圧ベクトルViを選択する。積分値算出部40では、電圧ベクトルViを入力とし、各相の印加電圧の積分値Δvu,Δvv,Δvwを算出する。補正部44u,44v,44wでは、これらをゼロにフィードバック制御すべく実電流iu,iv,iwを補正する。
(もっと読む)
駆動装置および車両
【課題】モータを良好に駆動するのに必要な電圧センサに検出誤差がある異常を判定する。
【解決手段】モータのトルク指令Tm*に基づいてPWM制御モードと矩形波制御モードとのうちいずれかの制御モードでインバータを制御するものにおいて、矩形波制御モードは、電圧センサにより検出された駆動電圧系の電圧VHとモータの回転数Nmとに基づいて電圧位相上限θlimを設定すると共に、設定した電圧位相上限θlimを用いてトルク指令Tm*に基づいて電圧位相指令θ*を設定して矩形波信号を出力する制御モードであり、インバータの制御モードCmの過変調制御モードから矩形波制御モードへの切り替え直前の過変調制御モードにおけるモータの電圧位相θovmが切り替え直後の矩形波制御モードで設定すべき電圧位相上限θlimより大きい場合には(S310)、電圧センサに検出誤差があるセンサ異常と判定する(S330)。
(もっと読む)
電動車両
【課題】電動機の回転軸の回転角を検出するセンサに角度ズレが生じていても、電動機の予期しない回生制動を回避して、二次電池の過充電をより確実に抑止する。
【解決手段】d軸にマイナス方向の電流Idを流すと共にq軸に電流が流れないように電流指令Id*,Iq*を設定してモータを制御する際には、制御に用いる回転角センサからの回転角θをモータの正転時には逆転方向に補正し、モータの逆転時には正転方向に補正することにより、回転角θを回生から力行に向かう方向に補正する。これにより、回転角センサにオフセット誤差が含まれていても、補正した回転角θに基づいてモータMG2を制御することにより、q軸にモータMG2の回転方向とは逆方向の電流が流れない、即ち回生トルクが出力されないようにすることができる。この結果、モータが予期せずに回生するのを防止でき、二次電池の過充電を抑止することができる。
(もっと読む)
交流モータの制御方法および制御装置
【課題】交流モータの動作状況に応じて電流のオフセット量を正確に検出でき、動作指令値の変更時や回転数が変化する途中の過渡状態でも誤ることがなく、高精度な制御を行える交流モータの制御方法および制御装置を提供する。
【解決手段】電流センサと位置センサとを備える交流モータの制御方法であって、電気角の1周期を検出する周期検出ステップ(S2およびS5)と、1周期にわたり電流の瞬時値を検出する電流検出ステップ(S1)と、電流の瞬時値を加算してオフセット検出値とする電流加算ステップ(S4)と、1周期の間に交流モータの動作状況が変化したか否かを判定する判定ステップ(S7)と、交流モータの動作状況が安定しているときにオフセット検出値に基づいてオフセット量を更新する更新ステップ(S9)と、動作状況が変化したときにオフセット検出値を廃棄する廃棄ステップ(S8)と、を有する。
(もっと読む)
モータ制御装置、モータ制御装置製造用プログラム、及びモータ制御装置の製造方法
【課題】モータの回転角度の補正を行っても、制御処理のスループット低下を防止する。
【解決手段】モータ制御装置は、モータの回転角度と角速度とを求め、前記角速度をビットシフトにより2のべき乗で除算するN(Nは2以上の正の整数)個のビットシフト回路と、1番目の前記ビットシフト回路の出力値から2〜N番目の前記ビットシフト回路の出力値を減算して前記回転角度の補正量を求め、当該補正量により前記回転角度を補正する演算回路とを備える補正部とを有し、モータを流れる三相交流電流から目標のトルクを得るための二相直流電圧を前記角速度に基づいて求めて、前記二相直流電圧を前記補正回転角度の正弦、余弦に基づいて三相交流電圧に変換することで、制御処理のスループット低下を防止する。
(もっと読む)
電力変換装置
【課題】電力変換装置において、モータ電圧歪みに起因する電源高調波を増大させないようにする。
【解決手段】電力変換装置において、スイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)のスイッチングを制御する制御部(5)を設ける。制御部(5)には、モータ(7)の電流を制御する電流制御部(53)と、電流制御部(53)へ入力される高調波成分を低減する高調波成分除去部(52)とを設ける。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】多相モータの各相の電流の位相遅れをそれぞれ補正するモータ制御装置を提供することである。
【解決手段】多相モータに接続され、直流電力を交流電力に変換する電力変換手段と、多相モータの少なくとも2相の相電流をそれぞれ検出する複数の電流検出手段と、多相モータの各相の相電流の位相遅れ量をそれぞれ設定する位相遅れ量設定手段と、複数の電流検出手段により検出された2相の相電流を含む、前記各相の固定座標系の相電流を回転座標系の電流に変換する座標変換手段と、座標変換手段により変換された回転座標系の電流と、外部から入力される多相モータの出力目標値に基づいて、電力変換手段を制御する制御手段とを備え、座標変換手段は、位相遅れ量設定手段により設定された各相の位相遅れ量に基づき各相に対応する複数の補正値を設定し、複数の補正値を用いて固定座標系の相電流を回転座標系の電流に変換する。
(もっと読む)
回転機の制御装置
【課題】コンデンサとインバータとの間の電気経路を開閉するリレーが開状態とされる状況下、モータジェネレータの通電制御によってコンデンサの充電電圧を規定電圧以下に放電する際、モータジェネレータが回転し続けることを防止する。
【解決手段】指令電流設定部30によって設定される指令電流idr,iqrは、固定座標変換部50によってαβ座標系に変換された後、β成分の符号が反転され、回転座標変換部54によってdq座標系に変換される。これにより、dq変換部54の出力は、指令電流設定部30によって設定される指令電流idr,iqrをα軸に対して線対称変換したものとなる。放電制御に際しては、対称変換された指令電流にフィードバック制御される。
(もっと読む)
モータ駆動機構、モータ制御装置、及び、モータ駆動車両
【課題】モータ駆動機構における電流検出手段のオフセット誤差に起因する微小振動の発生を回避するための技術を提供する。
【解決手段】モータ駆動機構が、多相モータと、多相モータに多相電流を供給するインバータと、多相モータに供給される多相電流を検出する電流検出手段と、インバータを制御するインバータコントローラとを備えている。インバータコントローラは、多相モータの実際の速度と速度指令値の少なくとも一方に応答して第1電流制御と第2電流制御とを選択的に行う。ここで、第1電流制御では、電流検出手段によって得られた多相電流の各相の検出電流値について、検出電流値が0を含む所定区間内にある相の電流値は0であり、検出電流値が0を含む所定区間内にない相の電流値は検出電流値に一致するとして多相電流が制御される。第2電流制御では、多相電流の検出電流値をそのまま用いて多相電流が制御される。
(もっと読む)
車両用制御装置および車両用制御方法
【課題】ハイブリッド車両が走行状態である場合にモータ電流を検出するセンサの検出誤差を精度高く学習する。
【解決手段】ECUは、トルク指令が一定の状態である場合に(S100にてYES)、フィードバック制御を停止するステップ(S102)と、暫定補正値を決定するステップ(S104)と、偏差Δi(n)を算出するステップ(S106)と、今回の偏差Δi(n)が前回の偏差Δi(n−1)よりも大きい場合(S108にてYES)、最終補正値を決定するステップ(S110)と、フィードバック制御を開始するステップ(S112)とを含む、プログラムを実行する。
(もっと読む)
交流回転機の制御装置
【課題】2組の三相巻線を有する交流回転機に対し、各組で位相の異なる搬送波に基づいて三相電圧を三相巻線へ出力する際、搬送波の位相のずれによる電流検出のタイミングのずれが生じても、応答の良好な制御性能が得られる交流回転機の制御装置を得る。
【解決手段】第1の搬送波および第1の搬送波と位相の異なる第2の搬送波を生成し、第1,第2の搬送波に基づいて第1,第2の電流検出信号を生成する電力変換手段と、第1の電流検出信号に基づいて第1の三相巻線に流れる電流を検出し、第1の電流検出値を出力する第1の電流検出手段と、第2の電流検出信号に基づいて第2の三相巻線に流れる電流を検出し、第2の電流検出値を出力する第2の電流検出手段とを備え、第2の電流検出手段は、第1,第2の搬送波の位相差に基づいて第2の電流検出値を補正する。
(もっと読む)
回転角度検出装置、回転電機装置および電動パワーステアリング装置
【課題】従来の回転角度検出の校正装置にあっては第2高調波の大きさが分かるものの、位相を考慮できていないという問題点があり、第2高調波の影響を完全に除去できないことがあった。また、ゼロ点パラメータの補正と第2高調波の補正を別々の手段で行なっているため、構造が複雑となってしまうという課題があった。
【解決手段】
互いに位相のずれた正弦波状の2相の出力信号を用いて回転角度を検出する、軸倍角がN(Nは正の整数)の回転角度検出装置であって、2相の出力信号をそれぞれEsin,Ecosとしたとき、Esin、Ecosの直流成分、およびEsin、EcosのN次成分を基本波成分としたときの第2高調波成分の振幅と位相に依存して発生する角度誤差N次成分(機械角360度周期の角度誤差を1次とした)を打ち消す手段として、回転角度に対して一定となる補正値を、2相の出力信号Esin、Ecosの少なくとも一方に加算する補正手段を備える。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】電動モータMを位置センサレス制御する場合において、低い制御周波数であっても、コストアップを招くことなく、制御応答性を向上させる。
【解決手段】電動モータMに流れる電流値に基づいてロータの位置誤差を推定し、推定された前記位置誤差d_BEMFからロータの回転速度を推定し、推定された前記回転速度ω^と予め設定した設定速度との偏差に少なくとも基づいて前記電動モータMに付与すべき制御電圧又は制御電流を設定する。その際に、電動モータMの慣性モーメントを測定しておき、前記回転速度ω^の推定パラメータとして、前記位置誤差d_BEMFに加えて前記慣性モーメントを用いるようにした。
(もっと読む)
電動パワーステアリング装置
【課題】センサレス制御を行う場合において、操舵フィーリングの低下を抑制する。
【解決手段】不感帯処理部112は、誘起電圧演算部111で算出した演算誘起電圧e’を入力し、不感帯変更部113から出力される不感帯指定信号Sにしたがって、操舵トルクTrの大きさが設定トルクTr0よりも大きい場合には、不感帯処理マップを参照して演算誘起電圧e’の不感帯処理を行い、操舵トルクTrの大きさが設定トルクTr0以下の場合には、演算誘起電圧e’の不感帯処理を行わない。従って、保舵時において操舵ハンドルが振動しない。また、操舵ハンドルを切り出すときには、推定電気角が固定されないため、操舵操作の引っ掛かり感がなくなる。
(もっと読む)
インバータ駆動装置
【課題】シャント抵抗には温度特性があるため、高温時などには実際の電流値と検出電流値にずれがでるという課題があった。本発明は、インバータ回路において、シャント抵抗の温度特性を考慮して検出電流値の精度を向上させるものである。
【解決手段】シャント抵抗の温度特性値を含めて検出電流値の補正を行うことでシャント抵抗が高温になっても電流検出を精度良く行うことを実現できようにし、より精度の高い制御を行うことが可能なインバータ駆動装置を提供することができる。
(もっと読む)
モータ制御
【課題】出力信号における何らかのドリフトをモータ運動中に補償できる、ブラシレス・モータを監視する方法を提供する。
【解決手段】電流測定手段30を使用してモータ10の巻線1、2、3へ流入または流出する電流を監視して電流を表示する出力信号を生成し、電流測定手段を通して流れる瞬時電流が実質的にゼロと知られる時に電流測定手段の出力を測定し、実測定出力信号値と理想出力信号値の間の何らかの差を補償する修正出力信号を生成する各ステップを含む。
(もっと読む)
車両のモータ制御装置
【課題】車両に搭載された交流モータに流れる電流を検出する2つの電流センサのゲイン誤差の比を精度良く算出して、2つの電流センサのゲイン誤差の不均衡を補正する。
【解決手段】交流モータ17の停止中に、トルク発生に寄与しない無効電流を交流モータ17に流すように設定した電流指令値Id ,Iq と、V相及びW相の電流センサ38,39の出力に基づいた電流検出値ids,iqsとの偏差が小さくなるように交流モータ17の通電をF/B(フィードバック)制御する無効電流F/B制御を実行して、この無効電流F/B制御の実行中に、V相及びW相の実電流iv ,iw を推定し、その実電流推定値の比(iv /iw )と、電流センサ38,39の出力の比(ivs/iws)とに基づいて電流センサ38,39のゲイン誤差の比(kv /kw )を算出する。このゲイン誤差の比を用いて電流センサ38,39の一方の出力を補正してゲイン誤差の不均衡を補正する。
(もっと読む)
モータ制御装置
【課題】モータ制御の電流検出方法として、多点同期電流を検出して移動平均信号とする場合、過去のデータを用いていることにより、検出値は移動平均期間の(N−1)/2倍の遅れが発生する。
【解決手段】2軸の電圧指令空間ベクトルを用いた空間ベクトル変調方式において、三相電圧指令値に変換して検出電流遅れ補償部に出力する。検出電流遅れ補償部では位相を順次進ませたキャリア信号と比較して予測ゲート信号を求める。予測ゲート信号に制御周期、モータの誘起起電力、モータのインダクタンスを用いて制御周期のPWM電圧によって変化する各予測点の電流成分を算出し、この算出された電流成分と、A/D変換器からの現在出力より順次遅らせたモータ電流とで移動平均信号を求め、この信号を検出電流とする。
(もっと読む)
1 - 20 / 83
[ Back to top ]