
Fターム[5H540EE07]の内容
リニアモータの制御 (2,479) | 制御、演算 (578) | フィードバック制御をするもの (314) | 位相をフィードバックするもの (8)
Fターム[5H540EE07]に分類される特許
1 - 8 / 8
リニア同期モータ
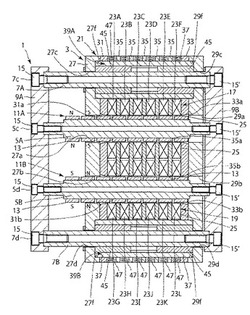
【課題】 固定子の製造コストを低減して、磁気損失の少ないリニア同期モータを提供する。
【解決手段】 一方の端部磁極部33の第1の一対の被連結部分47と、エンドブラケット35の第1の一対の被連結部分51と、端部磁極部37の第1の一対の被連結部分55と、5個の磁極部39の第1の一対の被連結部分59とを一対の磁性筒体41によって接続する。一方の端部磁極部33の第2の一対の被連結部分と、端部磁極部37の第2の一対の被連結部分と、5個の磁極部39の第2の一対の被連結部分とを一対の導磁性成形品43により接続する。一対の磁性筒体41にリニア軸受65を介して一対のガイド軸9をスライド可能に嵌合する。一対の磁性筒体41及び一対の導磁性成形品43によりヨークを構成する。5個の磁極部39のそれぞれを、複数枚の磁性鋼板を軸線方向に積層して構成する。
(もっと読む)
モータドライブ制御装置、モータドライブ制御方法

【課題】 モータドライブ装置の移動子の位置情報の再現性を維持しつつ、速度リップルを低減することができるモータドライブ制御装置、モータドライブ制御方法を提供する。
【解決手段】 モータドライブ装置における移動子より出力される位相のずれた2つの正弦波状信号に基づくリサージュ曲線に近似する楕円を示す楕円パラメータを算出する楕円算出部と、前記楕円パラメータにより示される楕円が真円となるように前記2つの正弦波状信号を補正する補正部と、前記補正された2つの正弦波状信号に基づくリサージュ曲線を前記移動子の移動速度を示す速度情報に変換する変換部と、前記速度情報とに基づいて、前記モータドライブ装置を制御する制御部とを有する。
(もっと読む)
リニアモータおよびリニアモータ駆動システム
【課題】簡易でより精度の高い位置決めが可能なリニアモータおよびリニアモータの駆動システムを提供することを課題とする。
【解決手段】固定子10と可動子20とが互いに相対運動するリニアモータ1であって、可動子に設けられ、相対運動の方向に異なる磁極のマグネット25n、25sが交互に並べられ、可動子の位置を検出するための位置検出用マグネット部25と、相対運動する位置検出用マグネット部のマグネットを検出して位置を検出するための位置検出用センサ16と、相対運動する位置検出用マグネット部のマグネットを検出するゲート用センサ36と、を備え、ゲート用センサが位置検出用マグネット部を検出するとき、位置検出用センサが位置検出用マグネット部に重なる位置に配置される。
(もっと読む)
ステージ装置、及びステージ装置の制御方法、それを用いた露光装置及びデバイスの製造方法
【課題】コイルに流れる電流の遅れに起因して生じる、駆動すべき方向とは異なる方向への力を低減させる。
【解決手段】コイル4、及び複数の永久磁石を有するリニアモータと、コイル4に電流を供給する電流ドライバ9と、該電流ドライバ9への指令を生成する制御手段7とを備えたステージ装置であって、制御手段7は、コイル4と永久磁石との相対位置に基づいて算出した電気角を用いた正弦波を、リニアモータへの推力指令値に乗ずるコミュテーション処理により指令を生成し、更に、指令に対して、推力指令値に比例した振幅を持ち、かつ、正弦波と90度に位相がずれた正弦波の成分を含ませる。
(もっと読む)
モータ制御装置とそのトルクリップル補正方法及びモータ制御システム
【課題】複数の周波数成分を含む高調波トルクリップルの補正が可能であり、また、トルク指令からコギング等のトルクリップルを正確に求めることができるモータ制御装置及びそのトルクリップル補正方法を提供する。
【解決手段】 設定したサンプリング条件に従って、サンプリング部10へサンプリング実行指令を出力するサンプリング判定部9と、複数箇所でのモータ位置Pmでサンプリングした補正後トルク指令Tr*を使って求めた複数のフーリエ係数an,bnから、平均化処理した平均値フーリエ係数an*,bn*を算出する平均化処理部13とを備え、補正値演算部12は、設定した繰り返し回数Kだけ更新するフーリエ係数an,bnまたは平均値フーリエ係数an*,bn*を使ってトルクリップル補正値Thを算出する。
(もっと読む)
リニアモータ
【課題】推力リップル分を含まないコギング補償フーリエ係数、推力リップル補償フーリエ係数も算出する。
【解決手段】負荷を移動制御するモータに流す電流に比例した推力を発生させる推力発生部に速度制御手段から推力指令が与えられ、前記モータの転流位相角に応じて発生するコギングを補償する補償量を手段または前記推力指令と前記転流位相角に応じて発生する推力リップルを補償する補償手段の少なくともいずれかを具備するリニアモータにおいて、前記推力指令及び前記転流位相角が入力され、前記モータの動摩擦力に起因する前記転流位相角の0次フーリエ積分を含むフーリエ積分演算に基づいて算出されるコギング補償フーリエ係数または推力リップル補償フーリエ係数の少なくともいずれかを、前記コギング補償手段または前記推力リップル補償手段の少なくともいずれかに与える、コギング・推力リップル総合解析部を備える。
(もっと読む)
リニアエンコーダ装置、リニアモータおよび単軸ロボット
【課題】リニアモータ等の装置における立ち上がり時間を短縮する。
【解決手段】リニアスケール11と、検出ヘッド12と、コントローラ20を備える。リニアスケール11は、インクリメント指標部15と基準指標部13とを有する。基準指標部13の各基準点情報13aは、基準指標部13から任意に抽出される3個の連続した情報のうち特定の情報と他の各情報とのピッチの組合せが、他の3個の情報に関する同組合せの何れとも異なるように情報間ピッチが設定されている。コントローラ20は、検出ヘッド12により連続する3個の基準点情報13を検出させ、これら情報に関する前記ピッチをインクリメント情報の検出信号に基づき演算し、さらにそのピッチの組合せに基づきリニアスケール11上の絶対位置を求める。
(もっと読む)
PM型モータの制御方法
【課題】PM型モータの標準励磁開始角の誤認識を検出する手段を提供する。
【解決手段】永久磁石の極性を検出する磁極検出器と可動体の電気角を検出する位置検出器とを備えたPM型モータの磁極検出器が出力する磁極検出信号の変化点の間の電気角間隔を位置検出器により測定してこれらを比較し、変化点間の電気角間隔と設定電気角間隔とのずれが許容角度間隔以上の場合に各相のコイルへの励磁を中止する。
(もっと読む)
1 - 8 / 8
[ Back to top ]