
Fターム[5H540FA05]の内容
リニアモータの制御 (2,479) | 位置検出 (313) | 移動子と固定子の相対位置 (165) | 位置検出器を用いないで検出するもの (22)
Fターム[5H540FA05]の下位に属するFターム
電気的変量にて検出するもの (14)
Fターム[5H540FA05]に分類される特許
1 - 8 / 8
電磁アクチュエータ制御装置及び方法
【課題】電磁アクチュエータにおいて、プランジャの位置を正確に検出する。
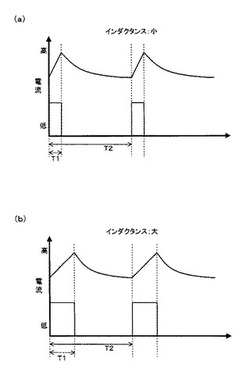
【解決手段】電磁アクチュエータ制御装置は、巻回されたコイル(210)と、コイル内に挿入されたプランジャ(220)と、コイルに通電を行うことで、プランジャを駆動する電流出力手段(110)と、通電に係る電流の時間平均を一定にするように、通電に対してパルス幅変調制御を行う電流制御手段(120)と、プランジャの駆動による誘起電圧を特定する誘起電圧特定手段(150)と、特定された誘起電圧がゼロである場合に、コイルのインダクタンスを算出するインダクタンス算出手段(170)と、算出されたインダクタンスに基づいて、プランジャの位置を検出する位置検出手段(180)とを備える。
(もっと読む)
弁開閉制御装置

【課題】戻しバネを用いることなく、流体通路を開閉する弁体を高速に精度良く、制御することのできる弁開閉制御装置を提供する。
【解決手段】流体通路に回動自在に設けられて流体通路を遮断又は開放状態に調整する弁体10と、弁体10を回動させる電磁アクチュエータ1とを備えた弁開閉制御装置であって、以下を備える。電磁アクチュエータ1に駆動電流を供給する駆動手段2と、電磁アクチュエータ1の推定インダクタンスを求めると共に、電磁アクチュエータ1を流れる駆動電流と推定インダクタンスとに基づいて弁体10の推定回動角度を求める角度推定手段5と、流体通路が遮断又は開放状態に調整される時の弁体10の回動角度である目標回動角度と推定回動角度との偏差に基づいて、駆動電流の目標電流を定める目標電流設定手段4と、駆動電流と目標電流とに基づいて駆動手段2を制御する電流制御手段3とを備える。
(もっと読む)
リニアモータの制御方法、制御装置及び電子機器
【課題】リニアモータの低コスト化と小型化及び低騒音化を達成することができるリニアモータの制御方法及びその制御方法が実行可能な制御装置並びにその制御装置を備えた電子機器を提供すること。
【解決手段】リニアエンコーダ21からの位置情報に基づいて、リニアモータ20の相切替を行う。これにより、リニアモータに内蔵されていた磁極検出手段を不要とすることができるので、リニアモータの低コスト化と小型化を達成することができる。
(もっと読む)
巻線切替リニアモータの駆動装置および駆動方法
【課題】ホール素子等の位相位置検出器なしで可動子と固定子の位相位置関係を検出するとともに原点駆動動作なしで、巻線切替リニアモータ可動子の絶対位置を検出することができる巻線切替リニアモータの駆動装置を提供することを目的とする。
【解決手段】巻線切替リニアモータ駆動装置において、制御器1は、巻線切替リニアモータの任意の片端から一部の巻線4を通電し磁極検出を行い、磁極検出が失敗した場合、隣接する一部の巻線を通電し磁極検出を行うという動作を繰り返し行い、磁極検出が成功した時点で通電している巻線と磁極検出により検出した磁極位置に基づいて巻線切替リニアモータ可動子6の絶対位置を算出する、という手順をとっている。
(もっと読む)
AC同期モータの初期磁極推定装置および推定方法
【課題】摩擦条件による誤差を補正して正確な磁極位置を推定できる初期磁極位置推定装置を提供する。
【解決手段】指令推力あるいはトルクパターン発生部1と、第1周期区間と第2周期区間を切換えるモードスイッチ2と、磁極位置指令値を磁極位置指令値+45度又は−45°にする第1、第2周期区間位相角度設定部3、7と、速度および位置を検出する第1、第2周期区間速度・位置検出部4、8と、第1機械定数、第1外乱推力あるいはトルク又は、第2機械定数、第2外乱推力あるいはトルクを演算する第1、第2機械定数・第2外乱推力あるいはトルク演算部5、9と、AC同期モータの速度、位置、第1、第2機械定数および第1、第2外乱推力あるいはトルクを格納する第1、第2メモリ記憶部6、10とを備えている。
(もっと読む)
スイッチングシステムおよびその調整方法
【課題】 複雑なループまたは制御プログラムを必要とせずに、正確且つ迅速にスイッチングを行い、スイッチング周波数を調整できるスイッチングシステムと、その調整方法を提供する。また、その他のモニター設備との外部接続を必要とせずに、製造と維持コストを大幅に低減し、且つ、位置決め時間も大幅に短縮でき、操作プロセスでの安定度を大幅に高められるスイッチングシステムを提供する。
【解決手段】 本発明におけるスイッチングシステムの調整方法は、初期信号をスイッチングシステム200に提供するステップと、前記スイッチングシステム200の自然周波数を得るステップと、前記自然周波数に基づいて、前記スイッチングシステム200のスイッチング周波数を調整するステップと、を含む
(もっと読む)
搬送装置、画像読取装置及び画像形成装置
【課題】磁束密度を検出するセンサを必要とすることなく、リニアモータの推力の変動を抑制するで高精度な搬送をすることが可能な搬送装置、画像読取装置及び画像形成装置を提供する。
【解決手段】エンコーダにより検出される固定磁石2aに対する電機子コイル2bの位置と、当該位置毎に供給される駆動電力の特性とに基づいて、記憶部34に記憶された磁極間隔情報を補正する。
(もっと読む)
リニアモータの制御方法
【課題】 推力ムラを取り除き、精度の良い推力直接制御を可能とするリニアモータの制御方法を提供する。
【解決手段】 リニアモータの位置xに対するリニアモータの電流分布D(x)を予め求めておく。目標推力に対応する計算制御電流Iに対し、リニアモータの実際の制御電流をI・D(x)とする。リニアモータの位置xに対するリニアモータの電流分布D(x)は、速度一定制御を行って求める。
(もっと読む)
1 - 8 / 8
[ Back to top ]