
Fターム[5H540FA06]の内容
リニアモータの制御 (2,479) | 位置検出 (313) | 移動子と固定子の相対位置 (165) | 位置検出器を用いないで検出するもの (22) | 電気的変量にて検出するもの (14)
Fターム[5H540FA06]に分類される特許
1 - 14 / 14
リニアモータ制御装置、及び制御方法
【課題】可動子の位置や移動量を検出するセンサを設けることなく、推定する磁極位置に含まれる誤差のばらつきを低減する。
【解決手段】可動子又は固定子のいずれか一方が複数のコイルを有し、可動子又は固定子のいずれか他方が駆動用磁石を有しているリニアモータの駆動を制御するリニアモータ制御装置は、予め定められた磁極位置に対応する電圧を複数のコイルに印加して初期磁極位置を推定し、推定した初期磁極位置に基づいて、可動子を可動範囲内の予め定められた基準位置に移動させる制御を行い、可動子が基準位置に達したと判定した際に、基準位置に対応する磁極位置を現在の磁極位置にする制御部を備える。
(もっと読む)
リニア振動モータの駆動制御回路

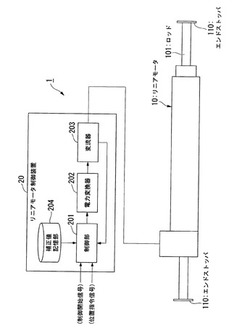
【課題】リニア振動モータの駆動終了時において、最適な停止制御を実現する。
【解決手段】リニア振動モータ200の駆動制御回路100において、駆動信号生成部10は、リニア振動モータ200の駆動終了後、その駆動時に生成していた駆動信号の位相に対して逆位相の駆動信号であって、駆動部20がハイインピーダンス状態に制御されるハイインピーダンス期間を含む駆動信号を生成する。誘起電圧検出部30は、ハイインピーダンス期間にコイルL1に発生する誘起電圧を検出する。コンパレータ41は、所定の不感帯では出力レベルが変化しないヒステリシスコンパレータとしての機能を備え、ハイインピーダンス期間に、ハイレベル信号またはローレベル信号を出力する。駆動信号生成部10は、コンパレータ41から、連続する前記ハイインピーダンス期間に、連続して同相信号が出力されたとき、リニア振動モータ200が停止したと判定する。
(もっと読む)
リニア振動モータの駆動制御回路
【課題】リニア振動モータの固有振動数と駆動信号の周波数とが一致するよう、駆動信号の周期幅を適応的に制御する際、コイルに発生する誘起電圧のゼロクロスの検出精度を高める。
【解決手段】駆動信号生成部10は、コイルL1に正電流と負電流とを非通電期間を挟んで交互に流すための駆動信号を生成する。駆動部20は、駆動信号生成部10により生成された駆動信号に応じた駆動電流を生成し、コイルL1に供給する。駆動信号生成部10は、非通電期間においてコイルL1に発生するゼロクロスの検出位置からリニア振動モータ200の固有振動数を推定し、駆動信号の周波数を、当該固有振動数に近づける。ゼロクロス検出部40は、誘起電圧以外の電圧のゼロクロスの検出を回避するための検出窓を設定し、その検出窓内で検出されたゼロクロスを有効とし、その検出窓外で検出されたゼロクロスを無効とする。
(もっと読む)
リニア振動モータの駆動制御回路
【課題】リニア振動モータの駆動終了時における振動停止時間を短縮する。
【解決手段】駆動信号生成部10は、コイルL1に正電流と負電流とを交互に流すための駆動信号を生成する。駆動部20は、駆動信号生成部10により生成された駆動信号に応じた駆動電流を生成し、コイルL1に供給する。駆動信号生成部10は、リニア振動モータ200の駆動終了後、その駆動時に生成していた駆動信号の位相に対して逆位相の駆動信号を生成する。駆動部20は、逆位相の駆動信号に応じた逆位相の駆動電流をコイルL1に供給することにより、リニア振動モータ200の停止を早める。
(もっと読む)
モータ駆動用半導体集積回路およびモータ用半導体集積回路
【課題】精度の高い駆動制御を行なうことができるコイルモータの駆動制御用半導体集積回路を得ること。
【解決手段】モータ駆動用半導体集積回路(200)は、回転駆動される磁気記憶ディスク上の記憶トラックに対して情報のリードを行なう磁気ヘッド(106)をディスク上で移動させるボイスコイルモータ(108)の駆動電流をボイスコイルモータのコイルに流れる駆動電流を検出しながらフィードバック制御により磁気ヘッドの移動を行なう。ボイスコイルモータをフィードバック制御する制御回路は、ボイスコイルモータのコイルに流れる駆動電流を検出する電流検出部、それにより検出された電流と与えられた電流指令値に基づいてボイスコイルモータのコイルに駆動電流を流すドライバ回路に対する駆動制御信号を生成するディジタル回路で構成された制御信号生成部(235)を備える。
(もっと読む)
リニア振動モータの駆動制御方法
【課題】低コスト、且つ、効率よく巻線へ電流を流す駆動制御を行う。
【解決手段】振幅検出部7が、非通電期間中に起電圧のサンプリングを行い、その中での最大点により振幅を算出する。これにより、サンプリング時間が多少ずれても十分に振幅を検出でき、次の巻線1への通電タイミングまでの時間に余裕がある。このため効率の良いタイミングで巻線へ通電することができ、モータ駆動の効率化、省電力化となる。
(もっと読む)
起振機
【課題】スライドマス型の起振機を採用するに当たり、今までにない駆動装置を採用し、且つ分解簡易にして持ち運びが容易となるものを提供する。
【解決手段】スライドマス型の起振機において、中空の箱体2と、該箱体2内に収納された多数個の錘8を持つ可動体3と、該可動体3を箱体2内で往復動させるリニアモータ12と、前記可動体3の振巾、振動数を制御する制御手段20,22,23とより成っている。
(もっと読む)
リニアシステムの磁極位置補正方法およびこの補正方法を用いたリニアシステム
【課題】 磁極位置を検出できるセンサを付けていないリニアモータを用いたリニアシステムにおいて、磁極位置の誤差を高精度に補正できるようにする。
【解決手段】 本発明の磁極位置補正方法は、初期磁極検出動作によって検出した位相信号を取得した後、可動子1bを外力によって一定速度で移動させ、可動子のコイルに誘起した誘起電圧波形又はモータ電流波形から、リニアモータ1の電気角がゼロになる位置を検出し、この位置をリニアモータの磁極位置として絶対値エンコーダ2の位置データを補正し、信号処理部2cに設けたEEPROMに記憶させるものである。
(もっと読む)
清掃装置
【課題】 歯牙を最適な運動にて清掃、マッサージする機具。
【解決手段】 手指により把持する把持部に第一磁場発生手段を設け、その磁場発生手段の内部にさらに第2磁場発生手段を設け、その第二磁場発生手段の端または内部に切削、研磨、清掃、診断用などの先端子を設けることにより的確な切削、研磨、清掃が可能となる。またそれらの磁場発生手段の時間、空間変動を検出すればその位置がわかり目視不可能な位置の切削、研磨、清掃が可能となる。さらにまた、磁場や振動を組織に伝達すれば、血行循環改善となる。
(もっと読む)
電磁アクチュエータの同期タイミング検出装置
【課題】可動部の揺動によって、その駆動コイルに発生する逆起電力電圧波形を用いて検出する同期タイミングの検出精度を向上する。
【解決手段】2軸回りに一方は低速で他方は高速で揺動可能に軸支した可動部の高速側駆動コイル14に発生する逆起電力を検出し、該検出された逆起電力信号faの電圧波形のゼロクロス位置を同期タイミングとして検出する同期信号検出装置2であって、前記検出された逆起電力信号faに重畳した駆動パルスPy波形を、該駆動パルスPy波形に同期した逆位相のキャンセルパルスPcで除去する波形処理回路20と、該波形処理回路20から出力する逆起電力信号fcから高速側のゼロクロス位置を検出する高速側逆起電力信号fyと、低速側のゼロクロス位置を検出する低速側逆起電力信号fxとを分離する逆起電力信号分離回路21と、を備えたものである。
(もっと読む)
リニアモータ制御システムおよびスターリング冷凍システム
【課題】 可動子のストロークを高い精度で算出し、可動子の他の部位への衝突を防止することが可能なリニアモータ制御システムおよびそれが用いられたスターリング冷凍システムを提供する。
【解決手段】 マイクロコンピュータは、モータ電圧v(t)、モータ電流i(t)、およびリニアモータに生じる誘起電圧のそれぞれが同一の角速度ωを有する正弦波であると仮定し、リニアモータのモータ電圧v(t)を示す電圧信号およびモータ電流i(t)を示す電流信号を用いて、正弦波の一周期における誘起電圧の実効値Eを算出する。その後、誘起電圧の実効値E、角速度ω、および誘起電圧係数(推力係数)αを用いて、前述の一周期における可動子のストロークSTを算出する。
(もっと読む)
制振装置及びその制御方法
【課題】簡易な構成で良好な制振効果を得ることができる制振装置を提供する。
【解決手段】 制振装置は、主系質量に接続される動吸振器を備えている。動吸振器は、補助質量と、主系質量及び補助質量のうち少なくとも一方の状態を検出するセンサと、センサの検出結果に基づいて駆動する第1リニアアクチュエータとを備えている。第1リニアアクチュエータは、コイルを有する第1部材と、移動可能に設けられた第2部材と、第1部材の第1領域に、第2部材に対向する磁極が互いに逆になるように第1の方向に並んで設けられた第1の一対の永久磁石と、第1部材の第2領域に、第2部材に対向する磁極が互いに逆になるように第1の方向に並んで設けられた第2の一対の永久磁石とを備えている。
(もっと読む)
リニアモータの制御方法および装置
【課題】 可動子のストロークが長く、複数に分割し連続して配置された固定子を備えたリニアモータにおいてアンプ切替の際に推力ショックのないセンサレス駆動を可能とするリニアモータの制御装置を提供する。
【解決手段】 複数の固定子に供給する電圧指令値と電流検出値から推定位置に基づき磁極位置を基準とする直交座標系における電圧、電流を演算する手段と前記電圧、電流から位置と速度を推定する手段と推定位置に基づき制御基準位置を調整する位置調整器とを備え、一つの速度制御器から出力される電流指令値を制御基準軸に基づき各固定子へ分配し、各固定子の駆動アンプへ適当な電圧を指令することを特徴とする。
(もっと読む)
駆動機構
【課題】、磁性体に供給される信号の極性を制御して、磁性体を被駆動体を駆動させるための駆動源として利用した駆動機構を提供する。
【解決手段】駆動機構は、複数の磁性体を備える組と、この組に周波数信号を供給する手段と、上記磁性体間の吸引―反発による運動を形成する手段と、を備える。この運動が駆動機構の駆動源となる。  (もっと読む)
(もっと読む)
1 - 14 / 14
[ Back to top ]