
Fターム[5H560AA03]の内容
無整流子電動機の制御 (40,007) | 用途 (2,430) | 記録再生装置 (114)
Fターム[5H560AA03]の下位に属するFターム
Fターム[5H560AA03]に分類される特許
1 - 20 / 63
半導体装置
モータ駆動装置、シート搬送装置及び画像形成装置
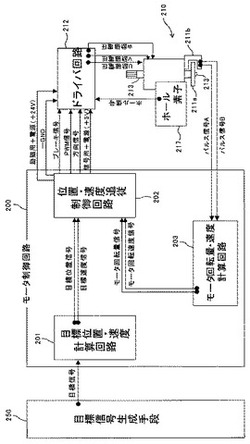
【課題】DCブラシレスモータを駆動源として用いて被駆動体の速度を自在に調整するとともに、回転センシング信号へのノイズの混入に起因するモータ回転の不安定化、及び負荷変動に起因する第1搬送ローラ16aの速度不安定化を抑える
【解決手段】DCブラシレスモータからなる搬送モータ210の励磁コイルの切り替えタイミングをドライバ回路212に把握させるために搬送モータ210の回転量を検知するホール素子217とは別に、同回転量をホール素子217よりも高精度に検知するモータエンコーダ211を搬送モータ210に搭載するとともに、ドライバ回路212を搬送モータ210に搭載し、モータエンコーダ211による検知結果に基づいてドライバ回路212からコイルに供給される励磁電圧の量を調整することで、搬送モータ210の回転速度を調整する速度調整処理を実施するように、モータ制御回路210を構成した。
(もっと読む)
モータ駆動装置及び記録装置

【課題】ホール素子自体の実装位置がずれている場合であっても、あるいは加減速を頻繁に繰り返す駆動形態においてもモータの駆動上の誤差を正確に補正すること。
【解決手段】モータ駆動装置であって、複数相のコイルと、ロータの回転に応じて電圧を出力する複数の検出手段とを有するブラシレスモータと、制御信号に基づいて前記複数相のコイルに対する電流の供給先を切り替えることによって、前記ブラシレスモータを駆動する駆動手段と、前記複数の検出手段から出力される検出信号と、前記ロータの回転角に応じた予め求めた電圧と前記複数の検出手段から得られる前記ロータの回転角に応じた電圧との差に基づいた補正信号との加算結果に基づいて、前記制御信号を生成する生成手段とを備える。
(もっと読む)
センサレスモータの制御方法、装置及びこれら方法、装置を用いる電動装置
【課題】モータ停止状態と回転状態とにかかわらずモータのロータとステータとの相対位置を正確に検出する。
【解決手段】モータの停止状態において、駆動信号としてロータ・ステータ相対位置測定用高周波電流成分を注入する手段を含み、この注入に対応する巻線(20)に流れる電流の測定に基づいてロータとステータとの相対位置を判定する第1相対位置検出回路系(13,15,16)と、モータの稼働状態において、駆動信号にロータ・ステータ相対位置測定用高周波電流成分を重畳する手段を含み、この重畳に対応する巻線(20)に流れる電流の測定に基づいてロータとステータとの相対位置を判定する第2相対位置検出回路系(14,15,16)と、当該判定された相対位置に基づいて駆動信号を生成する駆動信号生成回路系(16,11)と、を有する。
(もっと読む)
モータ制御装置
【課題】 DCモータにおける過剰トルクの付加をすみやかに検知してDCモータの回転駆動を停止させることができるモータ制御装置を提供する。
【解決手段】 DCモータ及び駆動回路からなるモータユニットに対し、DCモータの回転駆動を許可する回転イネーブル信号を供給するモータ制御装置であって、モータユニットへの供給電流を検出し、過電流を検知する過電流検知部と、過電流の検知結果に基づいて、回転イネーブル信号を生成する回転イネーブル信号生成部により構成される。回転イネーブル信号生成部は、DCモータの起動後の一定期間内において、過電流の検知結果にかかわらず回転イネーブル信号を出力し、一定期間の経過後において、過電流が検知された場合に回転イネーブル信号の出力を停止する。
(もっと読む)
センサレスモータ駆動装置および駆動方法
【課題】センサレスモータ駆動装置についてモータ駆動時の振動や騒音を低減する。
【解決手段】センサレスモータ駆動装置(60)は、モータ(1)のロータ位置を示す信号としてモータの各巻線のゼロクロスを検出して生成される第1のロータ位置信号に基づいて非通電期間を含む電流波形を生成して、当該電流波形に従ってモータの各巻線に電流を供給する第1の動作モードと、モータのロータ位置を示す信号としてモータの各巻線のゼロクロス以外に基づいて生成される第2のロータ位置信号に基づいて非通電期間を含まない電流波形を生成して、当該電流波形に従ってモータの各巻線に電流を供給する第2の動作モードとを備え、第1および第2の動作モードが切替可能に構成されている。
(もっと読む)
駆動制御装置、画像形成装置、用紙搬送装置及び画像読取装置
【課題】移動体を目標停止位置に保持するホールド処理によるハンチングの発生を従来よりも抑える。
【解決手段】信号出力手段として、モータ9の回転角度に応じた値となる3相の正弦波状のアナログ信号を、互いに120°ずつ位相ずれさせて出力するホールセンサ9cを用いるとともに、ホールド処理にて、ホールセンサ9cから出力される3相のアナログ信号の出力値の変化に基づいて、移動体の動きを検出する処理を実施するように、目標速度発生器1、速度制御部2、位置信号抽出部100、ホールド制御部5、セレクター3、シーケンス制御部6、カウンター7、ドライバ回路8などからなる制御部を構成した。
(もっと読む)
モータ駆動装置及び画像形成装置
【課題】アブソリュート方式のロータリーエンコーダーを用いることなく、従来よりもモータの駆動音を低減する。
【解決手段】ホールセンサ2によって検出可能な最小の回転角変位量よりも小さい所定の角度でモータ1の回転子が回転する毎に、所定のパルス信号を発信する回転パルス発生手段たるFG信号発電機3と、FG信号発電機3から出力されるパルス信号に基づいて計数処理を行う図示しないFG信号カウント部を有する絶対位相信号生成手段10とを設けるとともに、ホールセンサ2から出力されるホール信号とFG信号カウント部による計数結果とに基づいて正弦波状の駆動電流を生成するように、モータ駆動信号生成手段20を構成した。
(もっと読む)
小型FPGAベース・デジタル型モータコントローラ、その設計構造および提供方法
【課題】ソフトウェアに依存しないモータコントローラ102を提供する。
【解決手段】小型FPGAベース・デジタル型モータコントローラ102は、DCブラシレスモータ108の位置情報を提供する1つあるいは複数のセンサ104からセンサデータを受け取り、調整後のセンサデータを生成するように構成されたセンサインタフェース206と、DCブラシレスモータ108のコミュテーションを制御する切換コマンドを生成するように構成され、センサインタフェース206からの調整後のセンサデータからコミュテーションパルスを生成するコミュテーション制御部210と、コミュテーション制御部210からコミュテーションパルスを受け取り、リニアフィードバック制御パラメータを提供するためにコミュテーションパルスをDCブラシレスモータ108の回転速度に変換するように構成されたタイムインバータ208と、を備える。
(もっと読む)
モータドライバ制御装置、モータ制御装置、及び画像形成装置
【課題】 論理回路に安定したクロックを供給することが可能なモータドライバ制御装置、モータ制御装置、及び画像形成装置を提供することを課題とする。
【解決手段】 モータを駆動する複数のスイッチング素子の制御を行うモータドライバ制御装置であって、所定の周期の発振信号とパルス生成用信号とを比較することで生成された第1のパルス幅変調信号のデューティを制限し、第2のパルス幅変調信号を生成するデューティ制限手段と、前記第2のパルス幅変調信号をクロックとして動作する論理回路を含んで構成され、前記複数のスイッチング素子を制御する信号を生成するスイッチング素子制御信号生成手段と、を有することを要件とする。
(もっと読む)
エンコーダー及び電気機械装置
【課題】簡単な構成で高分解能なエンコーダーを実現する。
【解決手段】エンコーダー300であって、回転円盤310と、前記回転円盤上において前記回転円盤の円周に沿って等間隔に設けられたm個(mは2以上の整数)のスリット又は反射板で構成される光学要素列311と、前記光学要素列に光を照射する発光部320と、前記光学要素列の個々の光学要素を透過する、または反射する光を受光して矩形状の受光信号を出力する受光部371〜374と、を備え、前記発光部と前記受光部は、n組配置されており、個々の受光信号の1周期の位相差を2πと定義したとき、n個の受光部で生成されるn個の受光信号の位相がπ/nずつ順次ずれるように配置されている。
(もっと読む)
エンコーダー及び電気機械装置。
【課題】簡単な構成で高分解能なエンコーダーを実現する。
【解決手段】エンコーダー300であって、回転円盤310と、回転円盤上において等間隔に設けられたスリット又は反射板で構成される光学要素列311〜314と、光学要素列に光を照射する発光部321〜324と、光学要素列の個々の光学要素からの光を受光して矩形状の受光信号を出力する受光部371〜374とを備え、光学要素列は、回転円盤の中心からの距離が互いに異なるn個(nは2以上の整数)の円周に沿ってn列配置されており、n組の光学要素列は、等しい個数のm個(mは2以上の整数)の光学要素を含んでおり、発光部と受光部は、n組の光学要素列に対応してn組配置され、個々の受光信号の1周期の位相差を2πと定義したとき、n組の光学要素列とn組の発光部及び受光部とは、n組の受光部で生成されるn個の受光信号の位相がπ/nずつ順次ずれるように配置されている。
(もっと読む)
モータ制御装置
【課題】複数のモータを制御する場合、信号を伝送する信号線の数を少なくすることができるモータ制御装置を提供する。
【解決手段】第1モータ403の信号と第2モータ404の信号を交互に時分割で伝送することで、FG信号、ACC信号、DEC信号はそれぞれ1本の信号線で伝送される。ACC/DECモジュール220がFG1信号とFG2信号を識別するために、FG1信号とFG2信号は異なる電圧レベルを持つ。ACC/DECモジュール220は、モータからのFG信号の周波数と目標速度のFG信号の周波数を比較する。ACC/DECモジュール220は、目標速度よりモータの速度が遅い場合、ACC信号をその差分だけ出力して加速させ、逆に、目標速度よりモータ速度が速い場合、DEC信号をその差分だけ出力して減速させる。
(もっと読む)
DCブラシレスモータ駆動制御装置および画像形成装置
【課題】小さな回生電流で、かつ、短時間にモータの回転を止めることのできるDCブラシレスモータ駆動制御装置およびこの駆動制御装置を備えた画像形成装置を提供する。
【解決手段】回転速度を指示するクロック信号に応じて回転速度が制御されるDCブラシレスモータ駆動制御装置であって、前記DCブラシレスモータ回転停止の際に、先ず、前記クロック信号を停止して(S3)前記DCブラシレスモータの回転速度が所定の回転速度まで低下するのを待ち(S6)、前記所定の回転速度に達したときにショートブレーキを開始して(S7)回転を停止するように制御する制御手段を備えたDCブラシレスモータ駆動制御装置により前記課題を解決する。
(もっと読む)
モータ回転制御回路
【課題】 駆動信号のジッタを小さくして騒音を小さなモータ回転制御回路を提供する。
【解決手段】 回転検出信号の変化タイミングを検出してモータの回転周期の1/2の周期を有する第1タイミング信号と回転周期と同一周期を有する第2タイミング信号を生成する検出回路と、クロックによって計数動作して回転周期を計時する第1カウンタと、コイル電流の非通電時間を設定する第2カウンタと、第1カウンタからの信号に基づいてモータの回転周期を判定する周期判定回路と、周期判定回路により連続して同一の判定がなされた場合に第2カウンタをアップもしくはダウンさせるディジタル積分回路と、第1と第2カウンタの値の差がロードされクロック信号によってダウンカウント動作する第3カウンタとを設け、第3カウンタの計数値が「0」になるまでモータのコイルに電流を流すようにした。
(もっと読む)
モータ駆動装置及び電子機器
【課題】オープンループ制御及びフィードバック制御が可能で、フィードバック制御によってモータを連続かつ安定して駆動することが可能なモータ駆動装置を提供する。
【解決手段】オープンループ制御又はフィードバック制御によってモータ140を駆動することができるモータ駆動装置は、モータのロータ202の回転位置を検出する位置センサ142の出力に応じてオープンループ制御又はフィードバック制御を選択する制御部150を有する。
(もっと読む)
モータ制御装置,モータ駆動システム,ポンプ装置並びにモータ制御方法
【課題】回転位置信号の出力タイミングにずれがある場合でも、より正弦波に近い波形を出力し得るモータ制御装置を提供する。
【解決手段】マイコン2のモータ制御回路8は、ホール素子6Ha,6Hb,6Hcによりモータ6のロータ回転位置を検出し、その回転位置信号に基づいて決定したタイミングで波形メモリ31より正弦波状の波形データを読み出し、その波形データに応じた電圧信号を、インバータ回路5を介してモータ6の巻線6u,6v,6wに出力する。波形演算部12は、今回の制御周期においてPWM信号を出力する場合に、対応する波形データ値と前回のデータ値とを比較して、両者の差が所定値A以上である場合は前記差の一部に相当する値だけ今回出力するデータ値を修正する。
(もっと読む)
モータ駆動装置
【課題】回路及び制御の簡略化を図ると共に、PWM制御による速度制御の応答特性を改善することができるモータ駆動装置を提供する。
【解決手段】モータに電圧を供給するドライバと、電源電圧を昇圧してドライバに供給する昇圧部と、モータの回転速度を位相ロックループ制御し、回転速度を制御するパルス幅変調信号を出力する制御部と、制御部から出力されたパルス幅変調信号と、制御部において検出された回転速度の指令回転速度からの速度偏差を示す信号とを入力し、回転速度の変化を補償するようにパルス幅変調信号を補正して、補正されたパルス幅変調信号をドライバに供給する補正部とを備える。
(もっと読む)
マイクロコンピュータ,モータ制御システム,レゾルバ信号のデジタル変換方法
【課題】ソフトウエアに依存することなく、レゾルバの出力信号を高速に変換する機能を備えたマイクロコンピュータを提供する。
【解決手段】RDC16を、レゾルバ2より出力される2相信号をA/Dコンバータ21によりA/D変換して、モータ1の回転位置信号θを得るための信号処理をハードウエアによりデジタル演算で行うように構成し、そのRDC16を搭載してワンチップマイコン11を構成する。
(もっと読む)
電動機を駆動するための回路
【課題】従来とは異なる構成によって、PWM信号の進角制御や遅角制御を実現することのできる技術を提供する。
【解決手段】電動機を駆動するための回路は、電動機の第1と第2の駆動部材の相対的位置を示す周期的な位置信号に基づいて、電動機を駆動するための駆動信号としての周期的なPWM信号を生成し、PWM信号の周期の境界の時間的位置を、位置信号の周期の境界の時間的位置に対して、異なる位置に設定可能である。
(もっと読む)
1 - 20 / 63
[ Back to top ]