
Fターム[5H560DA06]の内容
無整流子電動機の制御 (40,007) | 位置検出(回転子) (3,428) | 光学的手段(エンコーダは除く) (22)
Fターム[5H560DA06]に分類される特許
1 - 20 / 22
電動オイルポンプ装置
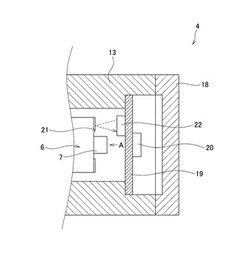
【課題】円滑に起動し、センサレス制御で確実に駆動できるブラシレスモータを備えた電動オイルポンプ装置を提供する。
【解決手段】基板19と対向するロータ6の回転面には、周縁部から中心に向かう白色の線状の検出対象物21が等角度で複数形成されている。基板19には、ロータ6と対向する面上に、発光素子と受光素子の2つの赤外線素子同士が同一方向に並んで配置された反射型フォトセンサである光センサ22が搭載されている。光センサ22の発光部から出た赤外光は、ロータ6の回転面に形成された検出対象物21に反射して光センサ22の受光部に入射する。制御部20は、光センサ22から出力された検出対象物21の検出パターンの情報に基づき、ロータ6の角度位置を演算する。
(もっと読む)
モータ制御装置

【課題】バッテリなど一定電力を供給する車両のシステムにおいて、モータに過大な電流供給があった場合、モータ電流指令値に制限をかけるとモータ電流の制限に遅れが発生し、電流制御の応答性に課題があった。
【解決手段】モータ1に与える電流指令値とモータ電流とに基づいてモータを駆動するためのモータ電圧指令値を算出するモータ電圧指令値演算手段12と、モータに供給する電源電圧を検出する電源電圧検出手段7と、電源電圧とモータ回転速度から、U相、V相、W相の各相モータ電圧へのPWMの指令Duty値を制限するDuty指令制限値を算出するモータ電圧指令制限値算出手段13と、Duty指令制限値によって、モータ電圧指令値を制限するモータ電圧指令値制限手段14とを備え、モータ電圧指令値に制限をかけることにより電流制御の応答性を早めた。
(もっと読む)
電動パワーステアリング装置
【課題】センサレス制御を行う場合において、操舵フィーリングの低下を抑制する。
【解決手段】電動モータの端子電圧Vu,Vv,Vwと相電流Iu,Iv,Iwと操舵トルクTrの符号とから誘起電圧eを算出し推定角速度ωmを求める(S11〜S15)。推定角速度ωmがゼロ近傍範囲に入っている場合(S16:Yes)には、操舵トルクセンサの回転角θt1を読み込みんで、その変化量Δθt1を算出する(S18〜S19)そして、変化量Δθt1を電気角の変化量に換算した角度Δθet1だけ推定電気角θebを変化させる(S20〜S21)。これにより、保舵状態を解除する場合でも、電動モータがスムーズに回り始める。
(もっと読む)
演算処理方法
【課題】可動部の現在位置情報から電流指令ポイントを求める際に、高分解能および低分解能の位置検出器に対応でき、オーバーフローを回避し、制御性能の低下を抑制できる演算処理方法を提供する。
【解決手段】固定子4の磁極中心間ピッチを基準とし、磁極中心間ピッチで発生する位置検出器のパルス数をP1、電流指令ポイントの基準となる磁極位置から可動子2の現在位置までの位置検出器のパルス数をP2、磁極中心間ピッチを一定間隔で分割する分割数をD1、電流指令ポイントの基準となる可動子2の現在位置をD2とすると、内分演算によって求まり、D2=D1×P2/P1となる。この演算処理は、サーボアンプのマイコンによって実行される。
(もっと読む)
複数のPMSM(永久磁石同期電動機)の制御装置および制御方法
【課題】 本発明は、複数のPMSM運転時に、1台のインバータによる効率的な方式により複数のPMSMの同期状態を監視する制御装置および制御方法を新規に提供することにある。
【解決手段】 本発明は複数のPMSMの制御装置および制御方法に関するものであって、常用交流電源を直流電源に整流するコンバータ部と、コンバータ部から出力される直流電圧を平滑にする平滑回路部と、該平滑回路部から出力される直流電源を3相交流電源に変換するインバータ部と、該インバータ部からそれぞれのPMSMに供給される3相交流電源で選択された各々のインバータの相の出力電流の合成を検知する電流センサおよび電流センサの検知結果によりインバータ部の駆動を制御する制御部を含む複数のPMSMの制御装置および制御方法にある。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】電圧飽和域においても円滑なモータ回転を実現することのできるモータ制御装置を提供すること。
【解決手段】電圧指令最大値演算部31は、q軸電流指令値Iq*に基づいて、発生しうるモータ12の最大回転角速度を推定し、当該推定された最大回転角速度に対応するd軸電圧指令最大値Vd_max及びq軸電圧指令最大値Vq_maxを演算する。そして、電圧指令値制限部28は、そのd軸電圧指令最大値Vd_max及びq軸電圧指令最大値Vq_maxを制限値として、d軸電圧指令値Vd*及びq軸電圧指令値Vq*についての電圧制限処理を実行する。
(もっと読む)
広ダイナミックレンジモータ制御のシステム及び方法
【課題】より広いトルク出力レンジを可能にする制御分解能を向上させる。
【解決手段】個別に整流される多相DC電気モータ602は、それぞれの相がトルク定数を有する相巻線を含み、それぞれの相巻線に供給される駆動電流に応答してトルクを生成する。コントローラ604は、多相DCモータによって生成される所望のトルクの大きさを表すトルク指令と、位相シフト指令とを受信する。コントローラ604は、トルク指令及び位相シフト指令に基づき、それぞれの巻線のトルクが比較的小さいときに、巻線それぞれの巻線電流のピーク振幅及び位相の制御を実行し、比較的大きいときに、巻線それぞれの電流のピーク振幅の制御のみを行う。これにより、より広い範囲のトルク出力制御が可能となる。
トルク制御を実行する。
(もっと読む)
電動パワーステアリング装置
【課題】位置検出センサの異常を早期に検出することができる電動パワーステアリング装置及び電動パワーステアリング装置の制御方法を提供すること。
【解決手段】回転位置・異常検出部230は、操舵補助モータ10の回転位置に基づいて出力信号の電圧レベルが変化する複数の位置検出センサ101a〜101cごとに、電圧レベルを検出し、検出された各電圧レベルが異常領域(天絡故障領域、中間故障領域、地絡故障領域)であるか否かを判定し、検出された各電圧レベルのいずれかが異常領域であると判定されると、判定された電圧レベルに対応する位置検出センサ101a〜101cの異常を確定し、位置検出センサの異常を検出する。
(もっと読む)
モータ駆動装置
【課題】簡単な回路構成でロータの停止位置を安定させ確実でスムーズな始動を実現するモータ駆動装置を提供する。
【解決手段】モータ駆動制御部は、モータ駆動停止時に、ロータが低速回転でロータとステータ間の磁気抵抗が最小となる位置でロータが停止する励磁相を選んで励磁して位置決め励磁を行い、モータ始動時に、ロータが停止した位置で最大始動トルクが得られる励磁相を選んで励磁する。
(もっと読む)
内燃機関の可変動弁装置
【課題】バルブ特性可変時の応答性低下という不具合への対策に位相差Δθを用いるに当たり、その位相差Δθを求める際の演算負荷増大を抑制し、バルブ特性可変時の応答性低下抑制と演算負荷増大抑制との両立を図る。
【解決手段】バルブリフト可変機構を動作させるブラシレスモータ47には、吸気バルブをリフトさせる際の反力が働く。この反力を利用してコイル42の非通電状態でのロータ46の回転が実現され、同ロータ46の回転時にコイル42にて生じる逆起電圧が電圧センサ41u等によってモニタされる。更に、同逆起電圧のピーク(極大、極小)の発生タイミングに対する各電気角センサS1〜S3におけるパルス信号のエッジの発生タイミングのずれ量が位相差Δθとして求められる。そして、適正タイミングからずれたタイミングで発生するパルス信号に基づくコイル42の通電相の切り換えタイミングが上記ずれをなくす方向に位相差Δθ分だけ変更される。
(もっと読む)
送風機駆動装置
【課題】強風による高速回転による回路損傷回避と高電圧モータの駆動とを両立すること。
【解決手段】直流電源もしくは、交流電源を整流平滑して得た擬似直流電源から、パルス幅変調手段を用いて任意の周波数と電圧の擬似交流へと変換して、送風機モータへ供給する電源を構成し、前記直流電源とパルス幅変調手段との間の電流を検出する手段を設け、検出した電流の極性が前記パルス幅変調手段から前記直流電源へとエネルギーが移動する方向である場合には、前記パルス幅変調手段から発生する擬似交流の振幅を前記直流電源の電圧に略一致させたまま、擬似交流の位相を調整して、前記電流の値が微少もしくは、逆方向の電流になるように制御する。
これによりモータの端子電圧を下げることができ、直流部分の部品の耐電圧が低い部品を使用でき、かつ、発電電圧の高い、効率のよいモータを使用することができる。
(もっと読む)
モータの制御方法及びそれを利用するモータ制御装置
【課題】モータの磁気的な非線形性、磁気飽和に起因してモータのインダクタンスがその電流値により大きく変動する。その結果、モータの制御誤差が発生し、制御精度が劣化する。
【解決手段】モータをコンピュータを用いた非線形有限要素法などで解析し、各電流値における各巻線の磁束鎖交数を求め、この磁束鎖交数のデータテーブルを備え、このデータデーブルの情報を使用してモータの電圧制御を行い、モータの制御パラメータの適正化をモータ制御中にオンラインで制御することにより高精密なモータ制御を実現する。
(もっと読む)
可変磁束ドライブシステム
【課題】可変磁束モータを駆動する可変磁束ドライブシステムにあって、可変磁石の磁束の繰り返し精度を改善し、トルク精度を向上する。
【解決手段】永久磁石を用いた永久磁石電動機1と、永久磁石電動機を駆動するインバータ4と、永久磁石の磁束を制御するための磁化電流を流す磁化手段とを備え、永久磁石はその磁束密度がインバータ4からの磁化電流によって可変できる可変磁石であり、磁化手段は、可変磁石の磁性体の磁化飽和領域以上の磁化電流を流すことを特徴とする可変磁束ドライブシステム。
(もっと読む)
モータ駆動システム
【課題】エネルギー効率を向上させたモータ駆動システムを提供する。
【解決手段】モータ駆動システムにおいて、多相定電流インバータ2−1乃至2−4は、直流定電流電源装置1の端子間に直列に接続され、多相定電流モータ3−1乃至3−4は、対応する多相定電流インバータ2−1乃至2−4に接続され、直流定電流電源装置1は、直流電源からの直流電圧に対して、出力電流が直流定電流となるように多相定電流モータ3−1乃至3−4の起電力を加算したものに応じて出力電圧の極性及び大きさを制御し、多相定電流インバータ2−1乃至2−4は、直流定電流電源装置1からの直流電流の方向を制御して矩形波交流電流を生成し、モータ3−1乃至3−4は、固定子巻線を流れる対応する多相定電流インバータ2−1乃至2−4からの矩形波交流電流に応じた駆動及び制動を行う。
(もっと読む)
モータ駆動システム
【課題】エネルギー効率向上の実用性を高めたモータ駆動システムを提供する。
【解決手段】インバータユニット20は、入力端と電機子コイル17の一端との間に接続される半導体スイッチ19−1と、電機子コイル17の他端と出力端との間に接続される半導体スイッチ19−2と、入力端と電機子コイル17の他端との間に接続される半導体スイッチ19−3と、電機子コイル17の一端と出力端との間に接続される半導体スイッチ19−4とを有しており、インバータ制御装置によって半導体スイッチ19−1及び19−2と、半導体スイッチ19−3及び19−4との少なくとも一方がオンとなるように、制御される。
(もっと読む)
電動機
【課題】 同数の巻き線磁極と永久磁石極を持つ電動機は、構造の簡易さ効率の高さが明らかであったが、その難起動性のために実用化が遅れていた。
【解決手段】 本発明では、第一の手段として、巻き線磁極または永久磁石磁極間に不均等な部分を設けた。
また、第二の手段として、巻き線磁極の中間または永久磁石磁極の中間の適当な位置に、1個以上の補助永久磁石極または補助巻き線磁極を配置した。
さらに、前記磁極構成に最適な電気回路を採用した。
(もっと読む)
ブラシレスモータの駆動制御装置、画像読取装置及び画像形成装置
【課題】本発明の課題は、ブラシレスモータを高速に起動制御できるブラシレスモータの駆動制御装置及びこれを用いた画像読取装置及び画像形成装置を得ることである。
【解決手段】ロータ9と複数相のコイルとを備えたブラシレスモータ3の駆動制御装置1であって、前記ロータ9の回転に同期して回転する被検出部11と、被検出部11に形成され且つ変調情報が埋め込まれたパターン情報と、前記パターン情報を読み取り変調された各出力信号を出力する検出部13と、前記検出部13から出力される各出力信号を復調する復調部15と、前記出力信号の情報を検出する出力信号情報検出部45と、前記ロータの回転を制御する制御部とを備え、前記制御部は前記復調部15で復調した復調情報と前記出力信号情報検出部45で検出された出力信号の情報に基づいて前記ロータ9の絶対角度又は前記ロータ9の磁極位置を検出している。
(もっと読む)
自動ドアの開閉制御装置
【課題】アシスト機能が設けられている自動ドアにおいて、利用者がどのような行為をしても、挟圧検知を誤動作なく行い、誤動作による自動ドアのアラーム停止を防止する。
【解決手段】自動ドアの閉鎖中に外力による開方向への移動が検出された場合に、前記ドアの開閉動作を開始するアシスト手段と、前記ドアの挟圧検知を行う挟圧検知手段と、前記アシスト手段による前記ドアの開放中に、前記ドアを開方向に移動させる外力が加わったことが検出されたときに、前記挟圧検知手段による挟圧検知を停止させて、母線電圧検出を行う母線電圧検出手段と、検出された前記母線電圧が所定の閾値より高い場合に、前記ドアをダイナミックブレーキにより減速させるダイナミックブレーキ減速手段と、検出された前記母線電圧が所定の正常値以下になった場合に、前記ダイナミックブレーキを解除して、前記ドアを力行制動で減速させて停止させる力行制動手段とを備えている。
(もっと読む)
モータ制御装置及びそれを備えた送風装置
【課題】モータの駆動を制御するモータ制御装置において、モータへの印加電圧にかかわらず、モータへ供給する電力を一定にすること。
【解決手段】モータに流れる電流を検出する電流検出手段と、モータへの印加電圧に対応する電圧を出力する可変電圧源と、を有し、可変電圧源から出力される電圧を用いて生成した基準電圧と、電流検出手段で検出した電流に応じて生成された電圧との電圧差を検出し、この電圧差に応じた電流を前記モータに供給することによって、モータへの印加電圧の変動にかかわらずモータへ印加される電力を一定にする。
(もっと読む)
回転体回転速度制御装置、プロセスカートリッジ、および画像形成装置
【課題】光透過型センサを使って回転体の回転速度を精度良く検出すると共に、回転体の着脱動作を容易に行えるようにする。
【解決手段】プロセスカートリッジは、感光体ドラム11を回転可能に支持するプロセスカートリッジ底板30と、プロセスカートリッジ底板30に対して回転軸31により矢印G方向に回動可能に軸支されたプロセスカートリッジ上カバー32などで構成され、プロセスカートリッジ底板30の所定位置に上向きに光透過型センサ16が固定され、プロセスカートリッジ上カバー32の所定位置に横向きに光透過型センサ15を固定されている。回転速度変動を検出する円板13が取り付けられた感光体ドラム11は、プロセスカートリッジ底板30の光透過型センサ16に対して着脱容易である。プロセスカートリッジ上カバー32に固定された光透過型センサ15は、閉じるだけで検出区間に円板13が入り込むため着脱容易である。
(もっと読む)
1 - 20 / 22
[ Back to top ]