
Fターム[5H680CC04]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 原理、現象 (1,634) | 振動モード (1,129) | 高調波振動 (117)
Fターム[5H680CC04]に分類される特許
81 - 100 / 117
圧電駆動装置、撮像装置、および携帯端末装置
【課題】衝撃耐性の向上と装置の小型化・薄型化を実現する駆動装置を提供する。
【解決手段】本発明の駆動装置は、圧電素子と、圧電素子の伸縮方向の一端に固定される錘と、圧電素子の他端に固定される駆動部材とを有し、圧電素子と錘とが前記圧電素子の伸縮方向に対して空間的に重なりを有して当接している。
(もっと読む)
圧電駆動装置、撮像装置、および携帯端末装置

【課題】衝撃耐性の向上と装置の小型化・薄型化を実現する駆動装置を提供する。
【解決手段】本発明の駆動装置は、圧電素子と、圧電素子の伸縮方向の一端に固定される錘と、圧電素子の他端に固定される駆動部材とを有し、圧電素子と錘とが前記圧電素子の伸縮方向に対して空間的に重なりを有して当接し、圧電素子と錘とが当接する当接面を含む平面付近に前記錘の重心が位置している。
(もっと読む)
表面硬化部材の製造方法、表面硬化部材、及び振動型駆動装置
【課題】安定した摩擦力を発生する表面硬化部材、その製造方法及び該部材を用いた振動装置を提供する。
【解決手段】ステンレス中に予め化合物相を分散させておき、そのステンレスから加工された部材を窒化処理することにより、分散した化合物相を耐摩耗性の高い窒素化合物相に変化させる。前記化合物相は、クロム炭化物、あるいはチタン硫化物からなる相である。電気ー機械エネルギ変換素子による振動が励起される振動子と振動によって駆動される移動子が、前記摩擦部材を介して接触する振動型駆動装置に用いられる。
(もっと読む)
圧電アクチュエータ、圧電アクチュエータの駆動制御方法、および電子機器
【課題】駆動制御を容易に実施できる圧電アクチュエータの提供。
【解決手段】圧電アクチュエータ20は、第1、第2振動領域R1,R2に入力する駆動信号D1,D2の位相差(駆動位相差)の正負の切替により、ロータを正方向および逆方向の両方に駆動可能であり、第1振動領域R1および第2振動領域R2のうち少なくとも位相遅れ駆動信号が供給される方に設けられた検出電極(261または262)により振動状態が検出され、この振動信号(S1またはS2)の駆動信号D1に対する位相差(検出位相差)を基に駆動制御されているので、単調増加または単調減少となる位相差特性を得ることができる。この検出位相差を駆動制御の設定値として駆動制御できるため、複雑なアルゴリズムを必要としないので回路規模が大きくならず、駆動信号の周波数制御を容易に実施することができる。
(もっと読む)
超音波駆動装置およびそれに用いる被駆動部材
【課題】 摩耗が少なくパーティクルの発生が抑制された超音波駆動装置を提供する。
【解決手段】超音波モータ10は、当接部13aを備えており、この当接部13aが摺接板4の駆動力伝達面4aに対して当接可能な状態で配置されている。摺接板4の駆動力伝達面4aは、純度99.5%以上のアルミナセラミックスで構成され、かつその平均粒子径が7.7μm以下であるセラミックス材料により構成されている。
(もっと読む)
変位拡大装置
【課題】高い共振周波数を維持し拡大変位量を増大することができるとともに、圧電素子の選択の自由度が向上した変位拡大装置を提供する。
【解決手段】 変位拡大装置は、圧電素子12と、この圧電素子の変位に応じて移動する可動部18を有し、圧電素子の変位量を拡大する変位拡大機構14と、を備えている。変位拡大機構は、可動部に隙間をおいて対向した支持部16と、それぞれ支持部と可動部とを連結しているとともに圧電素子の変位に応じて弾性変形する一対の平行なリンク部20a、20bと、を有し、圧電素子は、一対のリンク部の外側で支持部に取り付けられている。リンク部の一方は、板ばね21により構成されている。
(もっと読む)
超音波モータ
【課題】 ステータとロータの圧接面における偏磨耗を抑制して異常回転を防止し、寿命を長くすることが可能な超音波モータを提供する。
【解決手段】 圧電体13及び多数の櫛歯121を円周配列した櫛歯体12で構成されるステータ1と、櫛歯121に圧接されるロータ2とを備え、ロータ2は櫛歯121に圧接される面に櫛歯121の径方向の寸法よりも小さい幅の突条体22Aを有する。突条体22Aは櫛歯121の圧接面の領域内で円周方向に沿って径方向の位置が変化されている。ロータ2の回転時に突条体22Aは櫛歯121に対して径方向に変位されながら圧接されるため、ロータ2とステータ1の圧接面での磨耗はステータ1の圧接面のほぼ全面にわたって生じ、圧接面における偏磨耗の発生が防止され、寿命を高める。
(もっと読む)
アクチュエータ
【課題】電気機械変換素子の伸縮方向の端面に固着された駆動摩擦部材と、それに摺動する摺動部材とを面接触させることによって、安定した駆動制御を行うことのできるアクチュエータを提供する。
【解決手段】アクチュエータ34は、圧電素子42と、圧電素子42の伸縮方向の端面42Aに取り付けられた駆動軸44と、駆動軸44に係合された連結駒46と、連結駒46に支持されて駆動軸44に摺動する第1摺動部材52、第2摺動部材54と、を備える。第1摺動部材52、第2摺動部材54と駆動軸44は、面接触するように構成される。
(もっと読む)
アクチュエータ
【課題】電気機械変換素子と駆動摩擦部材を連結部材を介して連結することによって、形状の自由度が向上するアクチュエータを提供する。
【解決手段】アクチュエータ10は、圧電素子16と、圧電素子16の伸縮方向の端面16Aに固着された連結部材20と、連結部材20に取りつけられた駆動軸18と、駆動軸18に摩擦係合された連結駒22を備える。圧電素子16と駆動軸18は平行に配置され、連結部材14は、圧電素子16と駆動軸18の間に設けられた作用点を中心として揺動自在に支持される。
(もっと読む)
マイクロアクチュエータ、それを用いたヘッドジンバルアッセンブリ、ハードディスクドライブ、その製造方法
【課題】 強度の向上、駆動範囲の拡大化、製造工程の簡略化、製造コストの削減を図ることができるマイクロアクチュエータを提供すること。
【解決手段】 位置決め対象物を搭載するステージ4と、このステージ4が一体的に固定装着されるフレーム2と、このフレーム2に装備され印加される駆動信号に基づいて伸縮変形する圧電部材3と、この圧電部材に駆動信号を印加する駆動装置と、を備え、圧電素子3を、伸縮することによりフレーム2に回転力を付勢するよう配置した。
(もっと読む)
弾性表面波アクチュエータ
【課題】
励振手段の破損を防止でき、しかも固定子の耐久力を向上できる弾性表面波アクチュエータを提供する。
【解決手段】
弾性表面波アクチュエータは、圧電基板2と該圧電基板2の表面に形成されて圧電基板2に弾性表面波を発生させる励振手段となる電極3a,3bとを備える固定子1と、電極3a,3bが形成される励振用部位P1を除く圧電基板2の表面部位P2に所定の圧力で接触されて弾性表面波により移動させられる移動子4とを具備し、移動子4を接触移動させる移動用部位P3を含む圧電基板2の表面部位P2には、圧電基板2よりも高い硬度を有する硬質膜5が形成され、硬質膜5は、移動子4と電極3a,3bとが干渉しない程度の膜厚を有している。
(もっと読む)
電気機械変換素子を用いた駆動装置
【課題】 往復駆動を繰り返していくにつれて生じる係合部材の経時的な移動速度の低下を概ねなくすとともに、低温環境下においても係合部材の移動速度の上限値の低下を概ねなくすことができる。
【解決手段】 電気機械変換素子15と、前記電気機械変換素子の伸縮方向一端に固定された駆動摩擦部材17と、前記駆動摩擦部材に摩擦力で係合する係合部材11とを備え、前記電気機械変換素子15に電圧を印加して伸縮させることで、前記駆動摩擦部材17と前記係合部材11とを相対移動させる駆動装置であって、前記電気機械変換素子15に周波数10kHz以上300kHz以下の電圧を印加し、前記駆動摩擦部材15と前記係合部材11の係合部分に、基油動粘度が0℃において300mm2/s以下であるグリースを塗布する。
(もっと読む)
超音波モータの駆動方法及びその装置
【課題】 安定した駆動及び駆動音の低減を図ることのできる超音波モータの駆動方法及びその装置を提供することを目的とする。
【解決手段】 超音波振動子2に駆動交番信号を印加することにより、超音波振動子2に異なる2つの振動モードを同時に発生させ、超音波振動子2の摩擦接触子10に略楕円振動を生じさせて、超音波振動子2と超音波振動子2に接触する被駆動体3とを相対的に移動させる超音波モータ1の駆動方法において、駆動交番信号を印加する本振動領域の前に、摩擦接触子10に該略楕円振動よりも小さい予備振動を発生させる。
(もっと読む)
圧電アクチュエータの駆動制御装置、電子機器、および圧電アクチュエータの駆動制御方法
【課題】 駆動対象の駆動量および圧電アクチュエータの電流値を容易に制御することができる圧電アクチュエータの駆動制御装置、電子機器、および圧電アクチュエータの駆動制御方法を提供すること。
【解決手段】駆動制御装置において、PWM信号源が制御パルス信号Bをパルス幅可変に出力することで、駆動信号Aの周波数として選択される各設定周波数Lo、Hiが選択される期間t−l、t−hの比率が可変とされるため、これによってロータの回転数を自在に制御でき、また、圧電アクチュエータに流れる電流値も自在に制御できる。このような構成によれば、駆動周波数自体を制御する場合のように周波数を絞込むような困難性がなく、駆動制御を容易にできる。
(もっと読む)
超音波モータの駆動装置及びその方法並びに超音波システム
【課題】 超音波モータの速度制御を精度良く行うことのできる超音波モータの駆動装置及びその方法並びに超音波モータシステムを提供することを目的とする。
【解決手段】 超音波モータ1が備える複数の超音波振動子10a、10b、10cの各々に対して、所定の駆動周波数の2相の交番電圧を個別に供給することにより、超音波モータ1を駆動する超音波モータの駆動装置において、各超音波振動子10a、10b、10cに供給する2相の交番電圧の位相差を個別に制御することにより、超音波モータの速度を制御する。
(もっと読む)
圧電アクチュエータの製造方法
【課題】屈曲状の複数の駆動部とこれら複数の駆動部にそれぞれ配置された圧電層とを有する圧電アクチュエータを、より簡単に製造することが可能な製造方法を提供すること。
【解決手段】まず、板状部材24に、複数の貫通状のスリット28を形成して複数の駆動部20を分割形成する。次に、板状部材24に圧電材料の粒子を堆積させることにより、複数の駆動部20に複数の圧電層26をそれぞれ形成する。そして、各圧電層26にその厚み方向の電界を印加するための個別電極27を形成してから、複数の駆動部20を、板状部材24の面方向と直交する方向に突出するように折り曲げる。
(もっと読む)
圧電アクチュエータの駆動方法、圧電アクチュエータの駆動装置、電子機器、圧電アクチュエータの駆動装置の制御プログラム、および記録媒体
【課題】 駆動環境に応じて良好な駆動効率で駆動できる圧電アクチュエータの駆動方法、圧電アクチュエータの駆動装置、電子機器、圧電アクチュエータの駆動装置の制御プログラム、および記録媒体を提供すること
【解決手段】電源投入時または駆動開始時に、周波数スイープを行い各駆動周波数に対する消費電流を検出し、振動体の駆動特性を得るプリスキャン工程を行う。駆動信号決定工程では、プリスキャン工程で得られた駆動特性に基づいて、消費電流が所定基準値以上となる周波数を駆動周波数範囲に設定する。実際に回転軸を駆動する際には、駆動信号決定工程で設定された駆動周波数範囲内で周波数をスイープするスイープ駆動を行う。電源投入時または駆動開始時にプリスキャン工程を行うので、駆動環境に応じて駆動周波数範囲を設定できるので、駆動効率を良好にできる。
(もっと読む)
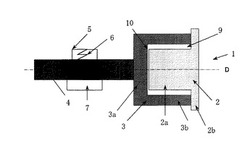
駆動装置
【課題】金属材料で形成する場合に比べて低コスト化と軽量化を図れるとともに、移動速度や駆動力を低下させることなく高剛性の可動子を用いた高性能駆動装置を提供する。
【解決手段】電圧が印加されることにより伸縮する圧電素子2と、圧電素子2の伸縮方向一端に固定された駆動軸3と、駆動軸3に摺動可能に摩擦係合する可動子4とを備え、圧電素子2の伸びと縮みの速度または加速度を異ならせて駆動軸3を振動させることにより、可動子4を駆動軸3に沿って移動させる駆動装置1であって、可動子4を炭素繊維を含む液晶ポリマーで形成した。
(もっと読む)
駆動装置および制御方法
【課題】 複数の駆動源に対して同一の駆動制御を行う場合には、複数の駆動源からの駆動力が動力伝達機構に伝達されない状態が生じてしまう。
【解決手段】 複数の駆動源(1a、1b)と、これら駆動源からの駆動力を合成して被駆動部材に伝達する動力伝達機構(2a、2b、4)と、各駆動源の駆動を制御する制御手段(8)とを有する。制御手段は、複数の駆動源に対して、互いに異なるタイミングで駆動信号を出力する。
(もっと読む)
案内装置
【課題】移動体と駆動源との摺接によって生じた粉塵を確実に除去することができず、位置決め精度が低下しやすい。
【解決手段】駆動源と、駆動源からの駆動力を伝達するための伝達部材と、伝達部材との摺接により移動する移動体と、伝達部材と移動体との摺接によって生じる粉塵を除去する粉塵除去部とを有する案内装置において、前記粉塵除去部が、周囲に弾性力により移動体に付勢するスクレーパ部を有する回転体からなり、前記スクレーパ部により粉塵を除去する案内装置とする。
(もっと読む)
81 - 100 / 117
[ Back to top ]