
Fターム[5H680CC04]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 原理、現象 (1,634) | 振動モード (1,129) | 高調波振動 (117)
Fターム[5H680CC04]に分類される特許
101 - 117 / 117
振動駆動移動体

【課題】移動機構の小型化を現実のものにすることが期待されている。本発明はこの課題を解決するためになされたもので、微小作業機械を駆動することができる、小型でシンプルかつ高性能な振動駆動移動体を提供するものである。
【解決手段】単体または複数の振動子3と、振動子3に接続してループを形成する弾性体2を一体化し、載置面5に接触する少なくとも3の接地脚を有し、交流電源6によって駆動された振動子3の振動が載置面5に伝達され、少なくとも3の接地脚が位相差を持って振動することによって、該接地脚と載置面5との摩擦により載置面5上を移動することを特徴とする振動駆動移動体1。
(もっと読む)
近共振広範囲動作電気機械式モータ
本発明は、屈曲モードの機械的(frm)と電気的(fre)の共振を組み合わせ、それによって比較的広い周波数範囲(Δf3)内で比較的良好な効率が達成できる。電気共振(fre)または機械共振は、もう一つの機械共振(frm)とおよそ同じオーダーの大きさにあるように設計されるが、その機械共振からは分離される。f1が最低のQ値を有する共振に関する共振周波数であって、Q1が機械共振の対応するQ値であるとした場合、好適には分離(Δf2)は2f1/Q1より小さい。上記の考えによる駆動要素と電気共振回路とを備えた電気機械式モータは、動かすべき物体に影響を与える単一の駆動点を有する二重バイモルフ駆動要素を備え得る。この二重バイモルフ駆動要素は、主変位方向に垂直な屈曲振動に励起され、それによって接線方向と垂直方向の両方の運動が屈曲モード振動によって生成される。  (もっと読む)
(もっと読む)
光学対物レンズ・モジュール

本発明は、光学ズームレンズ群2、焦点合わせ光学レンズ群4、及び2つのレンズ群の電気駆動機構を含み、組み合わせられた光軸が対物レンズの光軸7を形成する対物レンズ・モジュールに関する。本発明によれば、上記のレンズ群の電気駆動機構は2つのリニア形超音波モータ9、11の形態で実現され、2つの超音波モータの各々は圧電板12を含む。圧電板は2つの摩擦素子14を含み、これらの摩擦素子は対向する前面を押しつけられ、圧力素子15と一緒になって超音波モータの移動素子を形成する。移動素子の各々は、対応するレンズ群へ弾力的に接続される。超音波モータは、移動素子の変位方向が光学モジュールの光軸と平行になるように配列される。 (もっと読む)
超音波モータ、およびこれを使用したX−Y移動装置
【課題】一つの可動部材をコンパクトな構成でX−Y駆動させ得る超音波モータを提供する。
【解決手段】中央部に形成した凹部16c内に3点支持部16bを形成した支持部材16と、その支持部材16の前記3点支持部16bに個別に支持された3つの圧電素子14と、その3つの圧電素子14の他端14aに固定されて凹部16cより突出する可動部材12と、支持部材16に形成されて各圧電素子14に予圧を付加するスリット18とを備えている。
(もっと読む)
送り装置
【課題】出力部の静止安定性を高く維持しながらも、装置のコンパクト化を図ることができる、送り装置を提供することを課題とする。
【解決手段】 送り装置41は、ベース43と、相互に交差するように配置され且つ出力端部55を共有する少なくとも一対の超音波振動子51を有する出力部45と、出力部に対して被駆動部42への当接方向の予圧を付与する予圧付与機構47と、ベース43に固定され、出力部をベースに対して回動可能且つ一体的に支持し、その回動中心軸がベースと交差する方向に延びている、回動支持機構49とを備える。
(もっと読む)
駆動装置及びレンズ駆動ユニット
【課題】小型化を達成させつつ、作動部材の高精度な移動を可能にした駆動装置及びその駆動装置を用いたレンズ駆動ユニットを提供する。
【解決手段】駆動装置1は、圧電素子3に固定されたガイド部材7を備え、このガイド部材は、圧電素子3の伸縮方向Xに対して直交する方向にS極とN極とが着磁された永久磁石M1を有する。このガイド部材7で支持される、駆動装置1の作動部材9は、ガイド部材7のS極に対面する第1の面11aとガイド部材のN極に対面する第2の面11bとを有しガイド部材に対する磁気吸着と磁気反発とが発生する電磁石M2を含んでいる。そして、駆動装置1は、電磁石M2のコイル13及び圧電素子3に電気的に接続された制御手段5を更に備えており、制御手段5によって、圧電素子3にパルス電圧Pを印加すると共に、コイル13に流れる電流を制御することで、作動部材9を圧電素子3の伸縮方向に前進又は後退させる。
(もっと読む)
圧電アクチュエータの駆動装置、圧電アクチュエータの駆動方法、電子機器、圧電アクチュエータの駆動装置の制御プログラムおよび記憶媒体
【課題】 圧電アクチュエータの駆動周波数が、高調波による共振状態でロックすることを防止し、フィルタ用の外付け部品を設ける必要も無く回路の小型化も容易な圧電アクチュエータの駆動装置を提供すること。
【解決手段】 駆動装置50は、振動体910の振動状態を検出する位相差−DC変換回路53、比較回路54と、振動体が高調波で共振していることを検出して高調波検出信号を出力する高調波検出回路52と、振動体の圧電素子へ供給する駆動信号の周波数を制御する積分回路55、可変周波数発振器56、駆動回路57とを備える。積分回路55、可変周波数発振器56、駆動回路57は、高調波検出信号が出力されていない時は比較回路54の出力に基づいて前記駆動信号の周波数を制御し、高調波検出信号が出力されている間は、比較回路54の出力に基づく駆動周波数の制御を実行せず、駆動信号の周波数を変化し続ける。
(もっと読む)
超音波モータの制御装置
【課題】 従来のコイルを超音波モータの前段にコイルを入れ、駆動パルスをコイルにより昇圧した駆動波形を超音波モータの電極へ印加する駆動回路は、非常に簡素で低コストで実現できる駆動回路であったが、低速駆動時に駆動電流が大きくなるという問題があった。
【解決手段】 駆動電流を検知しながら、駆動電流が最も小さくなる駆動周波数を探し出し、その周波数に駆動周波数を固定して制御することにより、超音波モータ駆動装置の省電力駆動を実現する。
(もっと読む)
多自由度駆動機構
【課題】複数配置した、超音波モータ相互の力を合わせることで高出力な回転運動が可能な多自由度駆動機構の提供。
【解決手段】多自由度超音波モータαの固定子11上端と回転子12とを回転自在に圧接したものを複数台配置し、それぞれの回転子12の頭頂部に立設した回転子シャフト13と、それらの回転子シャフト13に取り付けられた伸縮自在のスライド機構14を具備することにより、多自由度超音波モータαが回転自在に傾き、その傾きに応じて回転子シャフト13の長さを調節し、多自由度駆動機構が傾斜方向及び横方向に回転するよう構成される特徴的構成手段の採用。
(もっと読む)
圧電アクチュエータの駆動装置
複数の圧電アクチュエータを駆動する駆動装置において、オンオフ切換え制御時の駆動電流を大幅に減少させ、装置全体の消費電力を低く抑える。複数の圧電アクチュエータ1a〜1hは、プレートを挟んでその対向表面に圧電板を各々貼り付けてなる。各圧電アクチュエータ1a〜1hの圧電板にあってプレートとは反対面にプラス側電源ライン19又はマイナス側電源ライン21を接続する。コントローラ27は、圧電アクチュエータ1a〜1hの圧電板に対しそれらプラス又はマイナス駆動電圧を選択的に印加してオン制御する。コントローラ27は、その後、オン制御した圧電板への当該駆動電圧をオフ制御すると同時に、次に駆動する圧電アクチュエータ1a〜1hの圧電板への当該駆動電圧の印加をオン制御する。  (もっと読む)
(もっと読む)
超音波モータの駆動回路およびアクチュエータ
【課題】簡易な構成で、超音波モータの駆動を容易かつ確実に制御することができ、駆動効率が高く、かつ制御分解能の高い超音波モータの駆動回路およびアクチュエータを提供する。
【解決手段】駆動回路5は、圧電素子を備える超音波モータ2を駆動する駆動回路であって、パルス生成手段と、単位期間設定手段と、パルス信号の単位期間内のパルス数を調節するパルス数調節手段と、前記調節されたパルス信号に対応するように、交流電圧を前記圧電素子に印加するとともに、前記交流電圧を前記圧電素子に印加している時間帯と重複しない時間帯において、前記パルス生成手段により生成されたパルス信号に対応するように、振幅の小さい交流電圧を前記圧電素子に印加し、前記超音波モータ2を駆動する駆動手段とを有し、前記単位期間内のパルス数を調節することにより、前記超音波モータ2の駆動を制御する。
(もっと読む)
小型化可能なモーター
本発明は、中空円筒状圧電振動子2によって駆動される回転子12を備える小型化可能なモーター1に関する。前記回転子は圧電振動子の摩擦面13に効率的に接続され、主電極または対電極3および励振電極4、5、6が中空円筒の表面に設置される。中空円筒状圧電振動子は三方晶系の単結晶材料から作られ、互いに120°の角度に位置する3個の主電極軸ならびに光学軸が設けられる。前記光学軸は、電気的軸の交差点に沿って90°の角度を含み、中空円筒状圧電振動子の長軸に一致する。さらに、それぞれの励振電極の軸方向対称軸は主電気的軸の1つと交差し、前記軸方向対称軸は光学軸に平行に延びる。  (もっと読む)
(もっと読む)
圧電アクチュエータの駆動方法、圧電アクチュエータの駆動装置、電子機器、圧電アクチュエータの駆動装置の制御プログラム及び記憶媒体
【課題】 圧電アクチュエータの消費電流を低減でき、システムダウンを回避できる圧電アクチュエータの駆動方法の提供。
【課題手段】 圧電素子91へ供給する駆動信号の周波数を所定範囲でスイープさせるとともに、前記圧電素子91の消費電流を検出し、この消費電流が基準値以上となった場合には圧電素子91へ供給する駆動信号の周波数を所定周波数分シフトしたり、初期値に戻して周波数スイープを継続する。圧電素子に供給する駆動信号の周波数をスイープさせる際に、共振周波数部分を外すことができる。このため、圧電素子は、消費電流が最も高くなる共振周波数部分を除いて駆動されるので、消費電流の極端な増加を防止でき、過大な消費電流が流れることによるシステムダウンを回避できる。
(もっと読む)
トルク制御機構付超音波モータ及び超音波モータ搭載ロボット
【課題】回転子に一端が接続されたワイヤを固定子の中空孔を挿通して張力を適宜調節可能に構成して超音波モータの予圧力を適宜調節するトルク制御機構付超音波モータ及び超音波モータ搭載ロボットの提供。
【解決手段】回転子2に一端が接続されてこの回転子2の回転中心Aを通り中空孔1aを挿通して固定子1を縦貫するワイヤ3と、固定子1中に圧電素子11,12,13,14とともに介層されて外表面中間に一体張出し外延した懸架フランジ15を鍔設した中空孔1aの下開口端B側で貫通垂下したワイヤ3下端に固着された張力調節手段5と、を具備させる特徴的構成手段の採用。
(もっと読む)
リニアアクチュエータ
【課題】磨耗や騒音を低減して製品の長寿命化を図れるとともに、駆動条件の変化にかかわらず安定した駆動性能を得ることができるリニアアクチュエータを提供する。
【解決手段】リニアアクチュエータ10は、圧電素子14と、圧電素子14の振動を伝達するロッド16と、ロッド16と摩擦接合し、ロッド16と相対移動するスライダ24およびキャップ26とを備え、スライダ24およびキャップ26において、最大高さRz>1μmで、かつ、負荷曲線の高さの中点での負荷長さ率が30%より大きい表面粗さであることを特徴とする。
(もっと読む)
多方向圧電モータ配置
複数の圧電モータ(31、32)の各々の連結部(48)をボディの表面に押圧することによって複数の圧電モータをボディに連結することと、ボディを動かすために表面に平行な(53)力を加えるようにモータの少なくとも一つを制御することと、その連結部が実質的に表面に垂直な(51)振動のみを行うように少なくとも1つのモータを同時に制御することと、からなる、ボディ(23)を動かす方法。 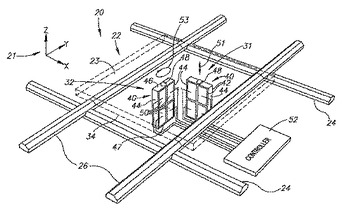 (もっと読む)
(もっと読む)
圧電アクチュエータ
外形寸法の増加を避けつつ、振動振幅が大きく、共振周波数の調整が可能であり、高信頼性を有する圧電アクチュエータを提供する。
圧電アクチュエータは、電界の状態に応じて少なくとも対向する2つの面が伸縮運動をする圧電体3aを有する圧電素子1aと、圧電素子1aを2つの面の少なくともいずれかで拘束する拘束部材21aと、拘束部材21aの周囲に設けられた支持部材4aと、両端の各々を拘束部材21aと支持部材4aとに固定され、拘束される面と略平行な方向に曲げの中立軸を有する複数のはり部材22aとを有する。  (もっと読む)
(もっと読む)
101 - 117 / 117
[ Back to top ]