
Fターム[5H680FF35]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 電源回路 (889) | 多相 (18)
Fターム[5H680FF35]に分類される特許
1 - 18 / 18
振動波駆動装置
【課題】回転体との接触部を複数有する振動子を備えた振動波駆動装置において、任意の軸周りに回転体を回転可能とした振動波駆動装置を提供する。
【解決手段】回転体との接触部を複数有する振動子を備え、振動子は、第1の定在波を前記振動子に発生させる、第1の駆動信号が供給される第1の電極群と、合成されて振動子に第2の定在波を発生させる、少なくとも2つの定在波を発生させる第2の駆動信号及び第3の駆動信号が、それぞれ供給される、第2の電極群及び第3の電極群と、を有し、第2の定在波は、腹の空間的位置位相が、第2の駆動信号及び第3の駆動信号によって設定され、第1の定在波は面内振動定在波かつ第2の定在波は面外振動定在波、または第1の定在波は面外振動定在波かつ第2の定在波は面内振動定在波であり、複数の接触部は、第1の定在波の波長の1/2の整数倍の間隔で配置されている。
(もっと読む)
アクチュエータ

【課題】 高出力・高信頼性のアクチュエータを提供する。
【解決手段】 本発明のアクチュエータは、一端部が固定端とされ、他端部が自由端とされた片持ち梁状であって、他端部側に摩擦駆動部4が設けられた振動体6と、振動体6の摩擦駆動部4が内面に対して遊びを設けた状態で挿入される孔部3aを有し、振動体6の周囲に回転可能に保持された可動部材3とを具備する。そして、振動体6を振動させたときに、摩擦駆動部4が、可動部材3の孔部3aの内面に当接するとともに、他端部側から平面透視したときに当接した箇所が一端部を中心とする円周と重なる軌跡を描くように駆動されて、可動部材3を振動体6の周囲で回転させる。
(もっと読む)
超音波モータ
【課題】振動部材から弾性部材に適切に振動を伝達し、効率よくロータを回転させる超音波モータを得る。
【解決手段】圧電体19は、接着剤25により貼着面27に貼り付けられる。接着剤25は、樹脂系接着剤、例えばエポキシ系接着剤又はアクリル系接着剤が好適である。これにより、圧電体19の片面全体が貼着面27に密着する。このとき、環状突起16bの径方向に対する段差16cの長さが圧電体19の内径よりも短いため、圧電体19の内周面と段差16cの外周面との間に間隔が空く。製造工程において、貼着面27の内周側、又は圧電体19の内周側に多めに接着剤25を付与すると、圧電体19を貼着面27に貼り付けたとき、段差16cの外周面と圧電体19の内周面との間に接着剤25がはみ出し、両者の隙間を充填する。
(もっと読む)
振動アクチュエータ、レンズユニット、及び撮像装置
【課題】用途が異なる複数種類の振動アクチュエータを製造する場合において、各用途毎の圧電素子ユニットの製作を不要にする。
【解決手段】振動アクチュエータ100は、回転軸回りに回転自在に配されたロータ160と、ロータ160に当接するステータ120と、ステータ120に回転軸方向に当接し、電力の供給を受けてステータ120に対して回転軸回りの変位を発生させることによりロータ160を回転させる電気機械変換部130とを備え、電気機械変換部130は、予め定められた数の圧電素子板が回転軸方向に積層されて一体化された圧電素子ユニット300を、複数個、回転軸方向に連結することにより形成されている。
(もっと読む)
ピエゾ式駆動装置
【課題】送信又は受信される電波が遮断されることが抑制可能なピエゾ式駆動装置を提供すること。
【解決手段】所定周波数の駆動信号がピエゾ素子21に入力され、軸線AXに沿って対象物16が移動されるピエゾ式駆動装置50であって、駆動信号の入力に基づいて伸縮するセラミックス材料のピエゾ素子21と、ピエゾ素子21からの力を受けて軸線AXを中心に回転する非金属の回転体25と、を備える。回転体25はセラミックス材料からなることが好ましい。
(もっと読む)
振動アクチュエータ及びその駆動方法
【課題】回転軸にずれを生じることなく回転子を正確に移動制御することができる振動アクチュエータを提供する。
【解決手段】駆動回路16のX軸周波数設定部161にはY軸方向の共振周波数fyとZ軸方向の共振周波数fzの中間値f1が、Y軸周波数設定部162にはX軸方向の共振周波数fxとZ軸方向の共振周波数fzの中間値f2が、Z軸周波数設定部163にはX軸方向の共振周波数fxとY軸方向の共振周波数fyの中間値f3が駆動周波数として設定される。回転子をX軸回りに回転させる際にはX軸駆動部164から第1及び第2の圧電素子部31及び32に駆動周波数f1の交流電圧を印加し、Y軸回りに回転させる際にはY軸駆動部165から第2及び第3の圧電素子部32及び33に駆動周波数f2の交流電圧を印加し、Z軸回りに回転させる際にはZ軸駆動部166から第1及び第3の圧電素子部31及び33に駆動周波数f3の交流電圧を印加する。
(もっと読む)
超音波モータ及び顕微鏡ステージ
【課題】効率よく安定した振動振幅が得られると共に実際の振動振幅をモニタ可能な超音波モータと、これを備える顕微鏡ステージを提供する。
【解決手段】顕微鏡ステージ1が備える超音波モータは、複数の矩形形状の板状圧電体を厚さ方向に積層して構成される振動子11と、板状圧電体に駆動信号を印加する駆動回路59と、板状圧電体が変形した際に生じる起電力を検出する検出回路60とを備え、その複数の板状圧電体は板状圧電体32、35を含み、板状圧電体32、35の各々は、縦振動を励起可能な縦振動用分極部と屈曲振動を励起可能な屈曲振動用分極部とが厚さ方向に分極された板状圧電体であって、板状圧電体35は駆動回路59と検出回路60とに接続され、板状圧電体32は、駆動回路59と接続され検出回路60と接続されない。
(もっと読む)
振動移動方法及び振動移動装置
【課題】小型かつ簡単な機構であるとともに、圧電アクチュエータの振動を直接的に移動平面に伝達することができる振動移動方法及び振動移動装置を提供する。
【解決手段】、本発明の振動移動装置は、印加電圧により振動を生ずる圧電アクチュエータ1を有する脚部2と、圧電アクチュエータ1を振動方向が移動面3に対して角度θだけ傾斜するように支持する移動体本体4と、を備えており、脚部2は、3枚の圧電アクチュエータ1を放射状に配置した構造をしている。
(もっと読む)
物体ハンドリング装置
【課題】駆動源に通電しなくても物体を把持し続けることができる物体ハンドリング装置を提供することを課題とする。
【解決手段】駆動制御部Tから振動アクチュエータAの圧電素子手段3に通電してロータ4を回転させることで関節機構により物体をハンドリングする。物体を関節機構で把持してその状態を保持しようとする時は、駆動制御部Tから圧電素子手段3への通電を停止すると、静止トルクによりロータ4のステータ2に対する回転が防止され、関節機構で物体Mを把持した状態が保持される。この通電停止時に、駆動制御部Tは、圧電素子手段3の各圧電素子板の電圧を測定することで応力及び温度を検出しており、所定値以上の応力を検出すると、駆動制御部Tは、関節機構のそのときの状態が保持されるように圧電素子手段3に通電して振動アクチュエータAを駆動する。
(もっと読む)
振動アクチュエータ
【課題】予圧機構部による大型化を抑え、回転子への予圧部の嵌り込みを生ずることなく、広い可動範囲を確保することができる振動アクチュエータを提供する。
【解決手段】基部ブロック1と固定子2との間に振動子3が挟持され、固定子2の凹部5内に略球体状の回転子6のほぼ下半部が収容されている。固定子2の上部に支持部材7が配置され、支持部材7のアングル部9の先端に予圧部10が支持され、予圧部10の多軸の回りに回転可能な球状部材11が回転子6の頂点部分に当接して回転子6に予圧力を付与している。振動子3を駆動することにより、回転子6が回転し、これに伴って出力軸12が予圧部10と支持部材7の環状部8との間を可動範囲として移動する。
(もっと読む)
ピエゾアクチュエータの駆動装置及びその駆動方法
【課題】安定状態で長時間駆動することができるピエゾアクチュエータの駆動装置を提供することを目的とする。
【解決手段】本発明に係るピエゾアクチュエータの駆動装置は、ピエゾモータの駆動装置1であって、電歪公転子11が駆動を開始する共振周波数f1が格納される記憶部14と、電歪公転子11に流れる電流を検出する電流検出部12と、電歪公転子11に入力される駆動信号の周波数を制御する制御部13とを備えたものである。そして、制御部13は、駆動を開始した周波数f1以上の周波数帯において電流検出部12によって検出された検出電流に応じて駆動信号の周波数fを制御する。
(もっと読む)
ピエゾアクチュエータ、レンズ駆動装置及び携帯機器
【課題】小型化された安価なレンズ駆動装置を提供することを目的とする。
【解決手段】本発明に係るレンズ駆動装置は、二つのレンズ部313,318を動作させるレンズ駆動装置11であって、二つのレンズ部313,318の配置方向に延在した円筒状形状を有し、二つのレンズ部313,318を動作させるための回転駆動力を発生させるピエゾ素子と、当該ピエゾ素子が構成する円筒状形状のそれぞれの端面に摺動可能に圧接され、ピエゾ素子317の回転駆動力によって回転する二つのロータ314,319と、当該二つのロータ314,319の回転それぞれを制動する二つのブレーキ316,321とを備え、二つのレンズ部313,318は、ロータ314,319の回転によって変位駆動するものである。
(もっと読む)
駆動装置、電子機器、制御方法、及びプログラム
【課題】振動波モータの保持トルクを低減させ、軽い操作で駆動対象部を回転させることで操作性を向上させることを可能とした駆動装置を提供する。
【解決手段】パンチルトカメラは、カメラ部102、パンユニット115、振動波モータ103、110、エンコーダセンサ106、113、エンコーダスケール107、114を備える。振動波モータは、圧電素子、振動子2、スライダ部材3、ロータ4、シャフト10を備える。使用者が手動でカメラ部102或いはパンユニット115を回転させた場合、エンコーダセンサ106(113)でエンコーダパルスが検知されるため、制御部20は、電圧制御発振器23から定在波に対応したパルス信号を発生させ、駆動パルス発生器24を介してドライバA25、ドライバB26に供給する。即ち、制御部20は、振動波モータの振動子2に定在波を発生させるように圧電素子に駆動電圧を印加する制御を行う。
(もっと読む)
超音波アクチュエータ及びその駆動方法
【課題】
出力トルク一定の条件で、精度良く減速動作が可能な超音波アクチュエータ及びその駆動方法を提供すること。
【解決手段】
本発明にかかる超音波アクチュエータは、例えば、A F機構に用いられ、トレインパルスよりなる駆動信号に応じて回転駆動力を発生するステ一タ1と、前記回転駆動力を実動運動に変換する移動子2とを備えたものである。本発明は、かかる構成を有する超音波アクチュエータにおいて、減速動作の場合に、連続するパルストレインの一部を間引いて駆動信号を構成するものであり、間引かれずに残るパルスの連続する数を最低限2つ、あるいは4つ以上とした。
(もっと読む)
振動型アクチュエータおよび振動型アクチュエータ製造方法
【課題】 振動効率の改善及び印加電圧の低電圧化を図る。
【解決手段】 振動型アクチュエータが、圧電体1の1対の面に面方向に互いに隣接してそれぞれ設けられ、圧電体1の1対の面間に電界を形成するための第1および第2の電極対と、第1の電極対を構成する第1および第2の電極2−b,2−aと、第2の電極対を構成し、第1および第2の電極とそれぞれ同一面に位置する第3および第4の電極2−d,2−cと、第1の電極2−bから第2の電極2−aへ向かう方向の極性を主成分とする第1の分極5−aと、第2の電極2−aから第4の電極2−cへ向かう方向の極性を主成分とする第2の分極5−bと、第4の電極2−cから第3の電極2−dへ向かう方向の極性を主成分とする第3の分極5−cとから構成される。
(もっと読む)
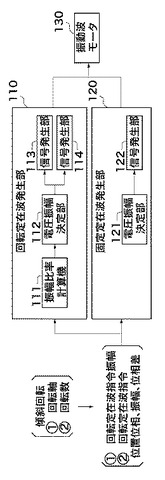
圧電超音波モータ駆動装置
【課題】本発明は製造が容易且つ自己発振及び回転方向が調整可能であって、環境的要因に関係なく常に高効率、高出力動作が可能な圧電超音波モータ駆動装置に関する。
【解決手段】所定形状の金属体と上記金属体の表面に付着する複数の圧電板とを含み、上記複数の圧電板の収縮、膨張によって金属体を回転させる圧電超音波モータにおいて、上記複数の圧電板中所定の圧電板に印加される電気信号を自己発振部を利用して圧電板の電気―機械的共振周波数で発振させることにより電気信号の周波数変動を抑制し、さらに上記自己発振部から所定の圧電板に印加される電気信号をディレイ部を通して+90または−90度で選択的に位相遅延させることによって圧電超音波モータの回転方向の調整を容易にする。
(もっと読む)
圧電アクチュエータの駆動方法、圧電アクチュエータの駆動装置、電子機器、圧電アクチュエータの駆動装置の制御プログラム及び記憶媒体
【課題】 複数の圧電アクチュエータの駆動時に消費電流過多によるシステムダウンを回避でき、回路構成の複雑・大型化を防止できる圧電アクチュエータの駆動方法の提供。
【課題手段】 複数の圧電アクチュエータを駆動する圧電アクチュエータの駆動方法であって、前記各圧電アクチュエータは、所定の周波数の駆動信号201,202が圧電素子に与えられることで振動する振動体を備える。各圧電素子へ供給する駆動信号201,20の周波数を所定範囲でスイープさせるとともに、圧電素子へ供給する駆動信号201,20のスイープ開始タイミングをΔTだけずらして制御することで、各圧電素子の消費電流が最大となるタイミングをずらす。これにより、各圧電アクチュエータの合計消費電流210のピーク値を抑えることができ、電流過多によるシステムダウンを回避できる。
(もっと読む)
圧電アクチュエータおよびそれを用いた電子機器
【課題】 移動体を多自由度で駆動可能な圧電素子アクチュエータ原理、構造及びそれを用いた電子機器に関する。
【解決手段】 本発明の圧電アクチュエータは圧電素子からなる駆動部の第一の方向の変位の加速度もしくは速度と、圧電素子の第二の方向の変位の加速度もしくは速度とを異ならせることで移動体に第一の方向もしくは第二の方向の駆動力を与えるとともに、駆動部の第三の方向の変位の加速度もしくは速度と、圧電素子の第四の方向の変位の加速度もしくは速度とを異ならせることで移動体に第三の方向もしくは第四の方向の駆動力を与えるような構成とする。
(もっと読む)
1 - 18 / 18
[ Back to top ]