
Fターム[5J062CC03]の内容
Fターム[5J062CC03]に分類される特許
1 - 2 / 2
統合型移動端末ナビゲーション
セルラ通信ネットワークの1以上の同期していない地上送信源102〜105からの信号を受信するための送信源受信機204と、衛星測位システムの衛星107〜110からの信号を受信するための衛星測位受信機200とを備えた移動端末100を含むナビゲーションシステムが提供される。端末100はクロック208も含む。プロセッサ209は、各値が受信機200、204によって生成された測定値を表している斯かる値のリストと、端末クロックのバイアスとを有する測定値ベクトルを取得する働きをする。プロセッサ209は、動的ナビゲーションソリューションを得るために、システムの現状態を表す状態ベクトルを、以前に決定された状態ベクトルと、測定値ベクトルと、動的モデルとを使って計算する。状態ベクトルは、その成分として少なくとも、(a)端末100の1次元以上の位置情報と、(b)同期していない地上送信源102〜105に付随するクロックの所与の時間に関するバイアスの表現と、(c)端末クロック208のバイアスと、(d)(a)乃至(c)の成分に関連する誤差を示すクォリティ指標と、(e)(a)乃至(c)の成分の他の成分に対する依存度を示す相関指標とを含む。 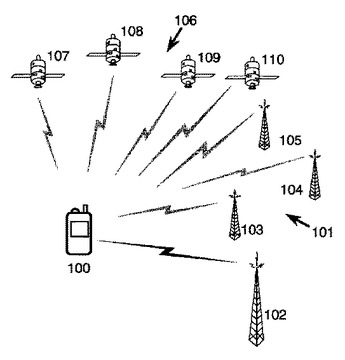 (もっと読む)
(もっと読む)
人物を位置特定する方法および装置
本発明は、動員時に被監視領域内の人員を位置特定する方法および装置に関する。この場合、超広帯域(UWB)で動作する少なくとも1つの送信機(2)と、超広帯域(UWB)で動作する少なくとも1つの送受信機(トランシーバ3)と、超広帯域(UWB)で動作する受信機が使用される。送信機(2)は動員中、被監視領域内に位置固定されて配置され、送受信機(3)は位置特定すべき人員に取り付けられ、受信機(4)は被監視領域外に設けられた監視用コンピュータ(指令センタ)に配置されてこの監視用コンピュータと接続される。 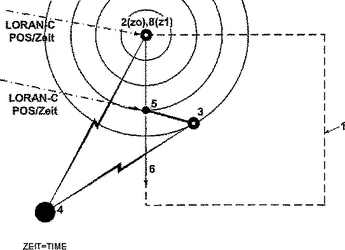 (もっと読む)
(もっと読む)
1 - 2 / 2
[ Back to top ]