
Fターム[5L096CA08]の内容
Fターム[5L096CA08]の下位に属するFターム
Fターム[5L096CA08]に分類される特許
1 - 4 / 4
光検出装置、及び光検出装置を備える紙葉類処理装置
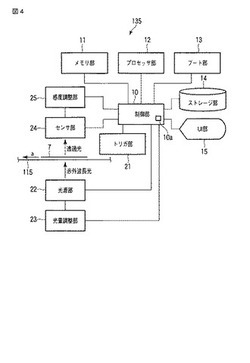
【課題】より安定して判定を行うことができる光検出装置、及び光検出装置を備える紙葉類処理装置を提供する。
【解決手段】光検出装置は、紙葉類に対して光を投光する第1の光源部(22)と、紙葉類から光を受光して画像を取得する第1のセンサ部(24)と、前記第1の光源部及び前記第1のセンサ部の両方、またはいずれかの補正要素を調整する第1の調整部(23、25)と、前記第1の調整部に補正要素を調整する毎に前記第1のセンサ部により前記紙葉類を読み取り、複数の画像を取得する画像取得部(10、24)と、前記画像取得部により取得した複数の画像と予め設定される参照データとに基づいて前記紙葉類の分類を判定する判定部(10)と、を具備する。
(もっと読む)
照合方法および照合装置

【課題】 高精度かつ計算負荷の小さい照合を行う生体認証技術を提供する。
【解決手段】 照合装置1において、撮像部100は、照合のための参照画像および対象画像を撮像する。演算部220は照合用の特徴量および補正用の特徴量を各画像から抽出する。補正用の特徴量は、画像の伸縮などに対してその絶対値が変化しない特徴量である。さらに演算部220は補正用の特徴量の1次元分布を用いて照合用の特徴量の1次元分布を補正する。記録部240は、参照画像の照合用の特徴量および補正用の特徴量の1次元分布を記録する。照合部230は補正された照合用の特徴量の1次元分布に基づき、認証対象画像と参照画像の照合を行う。
(もっと読む)
画像入力装置および画像評価装置
【課題】評価画像の表面状態や評価画像照明光等の外乱が存在する場合でも、評価画像と撮像装置との距離計測を安定して行い焦点調整が可能な画像入力装置およびこれを用いた画像評価装置を提供する。
【解決手段】半導体レーザー28から照射されたレーザー光はポリゴンミラー20により2次元の面状に変換し評価画像に照射され、反射光は2次元CCDである受光素子29で受光される。その反射光位置から三角測量方式を用いて評価画像25までの距離が算出される。算出結果に基づいて図示しない駆動装置により撮影時の焦点距離が適正に保持される。レーザー光Lが評価画像25の所望の領域を2次元で走査するように、ポリゴンミラー20のミラー面には面倒れや面ゆがみを意図的に設けてある。
(もっと読む)
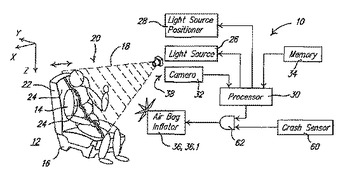
乗員検出システム
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
1 - 4 / 4
[ Back to top ]