
Fターム[5L096GA53]の内容
Fターム[5L096GA53]に分類される特許
1 - 20 / 43
薬剤計数装置およびその方法
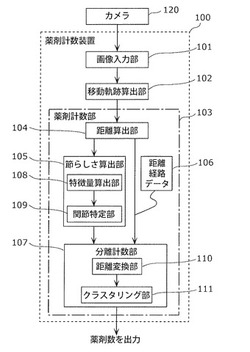
【課題】薬包の印字に影響されることなく、正確に薬剤を計数可能な薬剤計数装置を提供する。
【解決手段】揺動部により揺動されている薬包に封入された薬剤を撮像した動画像を構成する複数枚のピクチャにわたる、各々がピクチャを構成する1個以上の画素からなるブロックの動きの軌跡である複数の移動軌跡について、2点間距離と、測地距離とを算出する距離算出部104と、任意の移動軌跡間の2点間距離の時間変化および測地距離の時間変化に基づいて、各移動軌跡が薬剤と薬剤とが接触する部分である節の移動軌跡である度合いを示す節らしさ特徴量を算出する節らしさ算出部105と、節らしさ算出部105が算出した節らしさ特徴量に基づいて、薬包に封入された薬剤を計数する分離計数部107とを備える。
(もっと読む)
オプティカルフロー検出装置

【課題】この発明は、単独のフローの信頼度評価に対応でき、誤った衝突可能性判定を回避できるオプティカルフロー検出装置を実現することを目的とする。
【解決手段】この発明は、広角レンズを有する撮像手段と、撮像手段により撮像された画像上の物体のオプティカルフローを検出するオプティカルフロー検出手段と、撮像手段により次回撮像される時の、オプティカルフロー検出手段によりオプティカルフローを検出された画像上の第1の物体の、オプティカルフローを予測するオプティカルフロー予測手段とを備え、オプティカルフロー予測手段は、第1の物体は移動前後で高さの変動を発生せずに前方及び横方向に等速移動するとしてイメージプレーン上の移動予測位置を算出することを特徴とする。
(もっと読む)
物体識別装置
【課題】物体を識別するための計算量を低減すると共に、識別性能を向上させることができる物体識別装置を提供する。
【解決手段】学習処理部4は、コードブックの各小領域画像パターンにつき、物体のクラス番号及び位置情報と出現確率との関係を表す関数テーブルを生成し、各クラス間における特徴量の共用度を表すシェアリングマトリクスを求め、特徴量が類似するクラス同士をまとめた樹形図を作成し、小領域画像パターン毎に樹形図の各ノードの重みを計算する。認識処理部7は、カメラ2で取得した撮像画像データをコードブックと照合し、複数の小領域画像パターンのうち最も近い小領域画像パターンを選択し、その小領域画像パターンについて重みが閾値以上となるノードの中で重みが最も小さいノードに係るクラスを抽出し、そのクラスに対して小領域画像パターンの位置情報を投票して、物体を認識する。
(もっと読む)
画像処理方法、画像処理装置および画像処理プログラム
【課題】高速な顔検出を実現できる画像処理装置を提供する。
【解決手段】取得した画像から平滑化画像を生成するステップと、処理対象画像を含む処理対象画像以前の複数フレームの画像をもとに、各画素の平均値を算出し、算出した各画素の平均値とそれぞれのフレームの該当画素値から分散値を算出するステップと、処理対象画像の平滑化画像の輝度値に対して更なる平滑化処理を行い、正規化用画像を生成し、生成した分散値画像の各画素値に対して、生成した正規化用画像の各画素の値を用いて分散値画像の正規化を行い正規化分散値画像を生成するステップと、正規化した正規化分散値画像に対して膨張処理を実施して補正分散値画像を生成するステップと、補正分散値画像の各画素値に対して任意の閾値処理を行い二値画像を生成して人物領域を検出するステップと、分散値が一定値より大きいと判定された画素に対して顔検出処理を実施するステップとを有する。
(もっと読む)
状態追跡装置、方法、及びプログラム
【課題】局所最適解に陥ることを防止して、追跡対象の状態を追跡する。
【解決手段】類似性データ記憶部34に、観測空間におけるパーティクルの類似性を定めた類似性データを記憶しておく。事後確率分布推定部26で、前時刻に事前確率分布予測部28で予測された事前確率分布と、観測取得部24で実際に取得された観測とに基づいて、追跡対象の状態の事後確率分布を推定し、事前確率分布予測部28で、事後確率分布推定部26で推定された事後確率分布に従ってサンプリングされた現在のパーティクル、及び類似性データに基づいて、現在のパーティクルと観測空間において類似するパーティクルを用いて、次時刻の追跡対象の状態の事前確率分布を予測する。
(もっと読む)
奥行き画像内の物体を検出する方法およびシステム
【課題】画像内の物体を検出するスキャンウィンドウ手法であって、計算効率が良い方法で、奥行き画像内の物体を検出する方法を提供する。
【解決手段】奥行き画像内の物体を検出する方法が、奥行き画像内の領域を覆う検出ウィンドウを決定することを含み、該検出ウィンドウのロケーションは、奥行き画像内の候補ピクセルのロケーションに基づき、検出ウィンドウのサイズは、候補ピクセルの奥行き値および物体のサイズに基づいている。検出ウィンドウ内の前景領域が、候補ピクセルの奥行き値および物体のサイズに基づいてセグメント化される。特徴ベクトルが、前景領域内のピクセルの奥行き値に基づいて求められ、特徴ベクトルが分類されて、物体が検出される。
(もっと読む)
情報処理装置、情報処理方法およびプログラム
【課題】 高速、かつ、高精度のパターン認識が可能な情報処理技術を提供すること。
【解決手段】 情報処理装置は、複数のクエリーにより構成されるクエリー列を作成する作成部と、カレントノードの階層に応じて、クエリー列から階層に対応したクエリーの読み込みを行う読み込み部と、読み込まれた階層に対応したクエリーに従って、カレントノードに設定されている学習パターンを分割して、木構造のノードを生成する生成部と、生成された木構造のノードのうち、クエリー列の長さに対応する階層までのノードについて、各階層のノードを共通化したノードとしてまとめることにより、木構造を変更する変更部と、を備える。
(もっと読む)
心身状態管理装置
【課題】対象人物の心身状態を特徴付ける特徴量の抽出精度を高めて対象人物の心身状態をさらに精度よく判定する。
【解決手段】心身状態管理装置1は、処理装置2と記憶装置3とを備える。処理装置2において、顔画像取得部21は、対象人物の顔画像を取得する。認証部22は、対象人物を個人認証する。属性取得部23は、対象人物の属性を取得する。特徴抽出部24は、顔画像取得部21で取得された顔画像から対象人物の心身状態を特徴付ける特徴量を抽出する。記憶装置3の基準特徴量記憶部31は、基準特徴量を個人別に記憶する。比較部25は、対象人物に対応する基準特徴量と特徴抽出部24で抽出された特徴量とを比較する。判定部26は、比較部25の比較結果を用いて対象人物の心身状態を判定する。このような心身状態管理装置1において、特徴抽出部24は、属性取得部23で取得された属性に応じて特徴量の抽出手法を変更する。
(もっと読む)
行動判定装置、方法及びプログラム
【課題】本発明の目的は、行動について具体的な詳細ラベルを判定することである。
【解決手段】ユーザの動きを検出するセンサ信号から、ユーザの基本動作を判定する基本動作判定部と、基本動作を時系列に記録する基本動作記録部と、各行動シーンについて、基本動作とこの基本動作が発生する条件とを記憶する行動シーン判定テーブルと、行動シーン判定テーブルを用いて、時系列に記録された基本動作がどの行動シーンに該当するかを判定する行動シーン判定部と、行動シーン毎に、行動シーン内の詳細な行動を示す詳細ラベルを記憶する詳細ラベル判定テーブルと、詳細ラベル判定テーブルを用いて、行動シーン判定部によって判定された行動シーンに含まれる基本動作がどの詳細ラベルに該当するかを判定する詳細ラベル判定部と、を備える行動判定装置。
(もっと読む)
物体検出装置、物体検出方法及び物体検出プログラム
【課題】物体(人物)が比較的長い期間静止している場合でも、物体が背景モデルに同化することを抑制し、正確な物体の数の計数を可能とする。
【解決手段】物体検出処理部3では、固定カメラ1で撮影された入力画像と背景モデルとを、複数の画素からなるブロックに分割し、各ブロック毎に物体の輪郭に対応する物体領域を抽出する。また、この輪郭部分の内側の領域を埋めるように膨張処理を行うとともに、この膨張処理による物体領域の過剰検出を抑制する収縮処理を行う。荷重値テーブル生成部5は、物体の数に対する各画素の寄与率を表す荷重値を求めて荷重値テーブルを生成する。物体計数部6は、物体領域中の画素の荷重値を積算して物体の数を計数する。
(もっと読む)
学習装置、学習方法、識別装置、識別方法、プログラム、及び情報処理システム
【課題】異なる識別対象毎に固有の位置拘束を与えて、識別対象をより精度良く検出する。
【解決手段】特徴点抽出部24が、複数の生成用画像それぞれから特徴点を抽出し、特徴量抽出部25が、生成用画像から、抽出された特徴点の特徴を表す特徴点特徴量を抽出し、全体特徴量算出部243が、生成用画像上の全範囲のうち、複数の生成用画像に基づき決定されている特徴点選択範囲上に存在する特徴点の特徴点特徴量に基づいて、生成用画像全体の特徴を表す全体特徴量を算出し、識別器生成部27が、生成用画像の全体特徴量と、生成用画像がポジティブ画像であるかネガティブ画像であるかを表す正解ラベルとに基づいて、識別器を生成する。本発明は、例えば、所定の識別対象を識別する識別器を生成するための学習装置に適用できる。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】 入力画像から抽出された特徴ベクトルを複数のクラスタに分類し,その分類結果を基に入力画像の識別を行う手法では,特徴ベクトルの分類手法が識別性能に大きく影響するが、複雑な分類手法を用いると計算量が増大し,実時間での識別が困難となる。
【解決手段】 あらかじめ分類結果を記憶しておき、識別時には記憶した分類結果を基に高速に分類を行う。事前の分類では、分類を2段階に分けて行う。第一の分類は高速に実行可能な手法を用い、分類結果から複数の代表ベクトルを生成する。そして第二の分類では、作成した代表ベクトルに対して分類を行い,その結果をルックアップテーブルに記憶する。識別対象画像が入力されたときにはこのルックアップテーブルを利用することで、高速に分類結果を反映することができる。
(もっと読む)
2次元図形マッチング方法
【課題】逐次性を有する高速な2次元図形マッチング方法を提供することを目的とする。
【解決手段】入力地図および参照地図に新たな点を挿入し(S102,S108)、入力地図および参照地図の局所特徴を抽出し(S104,S110)、抽出された参照地図の局所特徴を記憶し(S112)、抽出された入力地図内の局所特徴の一つをクエリとし、類似する参照地図内の局所特徴を検索し(S114)、検索結果から解候補としての仮説を含む仮説集合を生成し(S116)、仮説集合に含まれる各仮説の確からしさを評価する(S118)。この際、参照地図の局所特徴のLSH関数によるハッシュ値に対応するビンに記憶し(S112)、クエリに関する局所特徴のLSH関数によるハッシュ値に対応するビンを検索し(S114)、点と仮説との対である点仮説ペアを評価する順序を計画し(S118a)、最良の仮説を選出する(S118b)。
(もっと読む)
画像形成装置及び画像形成方法ならびに画像形成方法を実行するプログラム
【課題】 レンダリング処理における、ビットマップフォントのエッジ抽出において、入力されたビットマップの条件(幅、高さ、フォント種、文字コード、文字セット等)によっては、一度にエッジ抽出を行うピクセル数が固定されている場合、冗長な処理になる可能性がある。
【解決手段】 ビットマップフォントの条件に応じて、一度にエッジ抽出を行うピクセル数を可変にする。またその際、エッジからピクセル座標を算出するルックアップテーブルサイズの削減と算出処理時間削減の為、一度に抽出出来るエッジ数に制限を設け、制限を越えた場合、ピクセル数を少なくする。
(もっと読む)
コンピュータによる文書作成時間検証方法およびコンピュータシステム
本発明は、コンピュータによる文書作成時間検証方法およびコンピュータシステムを公開し、該方法は、スキャナーのTWAINプロトコル・インターフェースを呼び出し、検証すべき文書と作成時間が既知であるサンプル文書のオリジナル色データを獲得するステップと、上記検証すべき文書のオリジナル色データで色標本点を収集し、上記検証すべき文書の色指標データを算出するとともに、上記サンプル文書のオリジナル色データ上の標本点を収集し、上記サンプル文書の色指標データを算出するステップと、上記検証すべき文書の色指標データと上記サンプル文書の色指標データとを比較して、既知の上記サンプル文書の作成時間に基づいて、上記検証すべき文書の作成時間を確定するステップとを含む。本発明によれば、サンプル文書と検証すべき文書を破壊することなく、コンピュータで検証すべき文書或いはサンプル文書のオリジナル色データを獲得し、且つ、オリジナル色データに対して標本点を収集して統計分析を行って、最終的に検証すべき文書の作成時間を得ることができる。  (もっと読む)
(もっと読む)
画像処理装置
【課題】複数フレームに跨る画像ブロックの動き検出する場合に、その動き検出の算出を速めて、画像処理を高速化できる画像処理装置を提供する。
【解決手段】特徴点マップ15をラスタ方向に検索し、そこに特徴点が存在している場合には、その特徴点の識別番号を利用し、動き情報テーブル17の識別番号に該当するテーブルブロックを見いだす。このテーブルブロックには、次追跡ブロックID(即ち次に処理すべきテーブルブロックを示す番号)が記憶されているので、次に、次追跡ブロックIDが示すテーブルブロックのデータ(特徴点座標や次追跡座標)を利用して、更に次追跡座標や動きベクトルを算出することができる。
(もっと読む)
画像追尾装置,画像追尾処理方法および画像追尾処理プログラム
【課題】 面積重心追尾方式による画像追尾処理において目標抽出処理の精度を向上させる。
【解決手段】 画像追尾装置1において,目標らしさ算出手段15は,画像取得手段11の画像から追尾目標を含むゲート内画像を抽出し,ゲート内画像の中心部および周辺部の濃度ヒストグラムから各濃度値の度数を算出し,各濃度値における目標らしさを算出する。画像2値化手段16は,目標らしさが所定値以上の濃度値を目標とする2値化テーブルを生成してゲート内画像を2値化処理する。面積重心算出手段17は,目標の2値化画像の面積重心を,目標らしさを考慮して算出し,追尾点とする。追尾誤差算出手段13は,追尾点と画像取得手段11の視軸との追尾誤差を算出し,指向手段14は,追尾誤差をもとに画像取得手段11の指向を制御する。
(もっと読む)
画像処理装置およびオブジェクト推定プログラム。
【課題】簡単な設定で、単眼カメラの画像から、精度の高いオブジェクトの推定を可能にした、画像処理装置を提供する。
【解決手段】オブジェクト推定処理部153は、抽出した矩形領域について、参照テーブル154を用いて、オブジェクトの推定を行う現在オブジェクトモデル推定処理部155と、現在オブジェクトモデル推定処理部155が推定した、現在と過去の推定結果の情報をもとに、尤度を利用してオブジェクトモデルの判定を行うオブジェクトモデル更新処理部156とを具備して構成される。
(もっと読む)
情報処理装置および情報処理方法
【課題】 カスケードに接続される複数の弱判別器を用いて画像データより特定のオブジェクトを抽出するにあたり、抽出処理速度と抽出精度との組み合わせを柔軟に変更できるようにする。
【解決手段】 カスケード接続される弱判別器を用いてデータを処理する情報処理装置であって、前記複数の弱判別器それぞれの処理内容を規定する情報を格納するROM205と、前記複数の弱判別器のうち使用すべき弱判別器を決定するための情報が規定されたテーブルを参照することにより、前記データの処理に使用すべき弱判別器を前記複数の弱判別器から選択する手段(201)と、前記選択された弱判別器に対応する前記処理内容を規定する情報に基づいて、前記データを処理することで得られた該弱判別器の評価値を用いて、前記データよりオブジェクトを抽出する手段(203)とを備える。
(もっと読む)
自動監視システム
【課題】例えば、監視対象領域の環境が変化するような場合においても、環境に適した物体検出方法を使用して物体検出の性能を向上させることができる画像処理装置を提供する。
【解決手段】画像処理装置1において、画像取得手段13が所定の領域(監視対象領域)の画像を取得し、環境情報取得手段11が前記所定の領域の環境に関する情報を取得し、物体検出手段B1〜B4が複数の異なる物体検出方法のうちの1つ以上の物体検出方法を使用して画像取得手段により取得された画像に基づいて物体を検出し、制御手段11〜13、A1〜A4が環境情報取得手段により取得された環境に関する情報に基づいて物体検出手段により使用する物体検出方法を切り替える。
(もっと読む)
1 - 20 / 43
[ Back to top ]