
Fターム[5L096HA11]の内容
Fターム[5L096HA11]に分類される特許
161 - 169 / 169
音声および映像ソースデータを分離および評価する技術
音声および映像を、分離および評価する方法、システム、および装置が提供される。音声および映像はキャプチャされ、1人以上の話し手の発言を検出することを目的として映像が評価される。視覚的特徴は、発言する話し手に関連付けられる。音声および映像は分離され、各話し手に関連する音声を分離すること、および、音声に関連するノイズを除去することを目的として、対応する音声の一部が視覚的特徴にマッチングされる。  (もっと読む)
(もっと読む)
パターン抽出装置

【課題】画像データから人物の肌領域を抽出する際の信頼性を高める。
【解決手段】CCDカメラ1の撮像により得られるシーン画像の画像データの複数の画素値をカウンタープロパゲーションネットワーク(CPN3)に入力するとともに、オペレータが肌領域や髪領域等のカテゴリを示す教師信号を与える。CPNには学習により肌色モデルを表すカテゴリマップが形成される。次に、バックプロパゲーションネットワーク(BPN5)に対し、カテゴリマップの各ユニットについて、そのユニットへの入力結合荷重を入力値として与え、そのユニットのカテゴリを教師信号として与える。これにより、肌色モデルに適合したBPNが形成される。なお、特定の画像データをこのBPNによってカテゴリ分類させた結果に基づいて、この画像データの肌色モデル及び対応するBPNの構築を行ってもよい。
(もっと読む)
オンライン学習を用いた連続的な顔認識
顔分類のシステムおよび方法。システム(10)は、顔分類器(40)を有しており、該顔分類器は、ビデオ入力(20)中に検出されたある顔画像が当該分類器(40)中で既知の顔に対応するかどうかの判定を提供する。システム(10)は、未知の検出された顔が一つまたは複数の持続性基準(100)または顕著性基準を満たすときに、その未知の検出された顔を分類器(40)に追加する。  (もっと読む)
(もっと読む)
画像の顕著性マップを生成する装置および方法
本発明は、画像の顕著性マップを作成する装置および方法に関する。この方法は、
− 輝度成分(A)にしたがって画像を投影し、またこの画像がカラー画像の場合には、輝度成分(A)および色成分(Cr1,Cr2)にしたがって画像を投影するステップ(E1)と、
− 人間の眼の視感度閾値にしたがって上記成分(A,Cr1,Cr2)の知覚的サブバンド分解を行うステップ(E3,T2,T'2,T''2)と、
− 上記の輝度成分(A)に関連したサブバンドの顕著要素を抽出するステップ(E7)と、
− 上記の輝度成分(A)に関連したサブバンド毎にこの顕著要素の輪郭強調を行うステップ(E8,T7)と、
− 上記の輝度成分(A)に関連したサブバンド毎にこの輪郭強調から顕著性マップを計算するステップ(T7)と、
− サブバンド毎に得たこれらの顕著性マップの関数として上記記顕著性マップを作成するステップ(T8)とを有する。  (もっと読む)
(もっと読む)
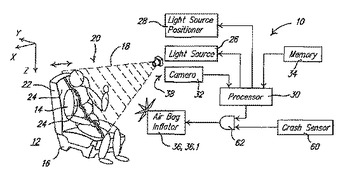
乗員検出システム
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
画像などの既存の位相情報を有するデータ配列を処理するためのニューラルネットワーク及び該ネットワーク使用方法
相対的な位相情報を有するデータ配列を処理するためのニューラルネットワークであって、人工ニューラルネットワークのノットに対応するセル(Ki)のn次元配列を備え、前記セルのそれぞれが、前記セル(Ki)に直接隣接するとともに該セル(Ki)の近傍を形成する周囲のセル(Kj)に対する結合を備え、前記セル(Ki)のそれぞれが、前記周囲のセルに直接隣接する1つのセルへの各結合のためのインプットを備えるとともに、1つ若しくはそれ以上の前記直接隣接するセル(Kj)への結合のためのアウトプットを備え、前記セル(Ki)と前記直接隣接するセルの間の前記結合が重み(wij)により決定され、前記セルのそれぞれが、前記セル(Ki)の活性値或いは活性化関数(Ai)として定義される内部値により特徴付けられ、前記セル(Ki)のそれぞれが、信号処理を実行することによりセルのアウトプット信号(ui)を作り出し、セル(Ki)の前記出力信号(ui)が前記直接隣接するセルの入力値の関数であり、セルのそれぞれが、対応するセルの開始値であり、前記ニューラルネットワークの特定数の相互作用的処理段階の後に、セル(Ki)の内部値或いは出力値(ui)を、一意的に関連付けられたデータ・レコード(Pi)のための新たに得られた値(Ui)としてみなすことにより、処理が行われることを特徴とするニューラルネットワークである。 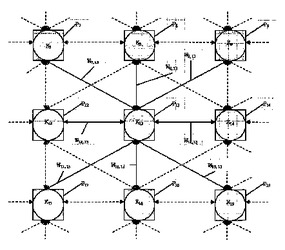 (もっと読む)
(もっと読む)
構成要素に基づいた物体の同一性確認システムを訓練するシステム及び方法
構成要素に基づいた顔認識システムを訓練するために、事例として用いる構成要素を決定するシステムと方法が提示される。一つの実施形態においては、構成要素の初期の形状と大きさが決定され、訓練集合が構築され、構成要素認識分類器が訓練され、そして分類器の精度が予想される。構成要素は四方向(上、下、左および右)のそれぞれの方向へ暫定的に拡張され、分類器の精度に及ぼす影響が決定される。その後、構成要素は分類器の精度を最大化する方向へ拡張される。処理は分類器の精度を最大化するために多数回実行しても良い。  (もっと読む)
(もっと読む)
パターン検出装置及び方法、画像処理装置及び方法

【課題】 注視位置及び注視領域の設定及び変更を安定的かつ効率的に行いながら入力パターンより所定パターンの検出を行なう。
【解決手段】 入力パターンより所定パターンの検出を行なうパターン検出装置に、パターンを入力する入力層101と、入力されたパターンを所定の方法によりサンプリングして得られる各点に対応して、それぞれ複数の特徴を検出する複数個の特徴検出モジュール106を複数の階層に設けた特徴検出層102と、上位層からのフィードバック信号の分布に基づき、下位層出力に関する注視領域109の設定を制御する注視領域設定制御層108とを備える。
(もっと読む)
画像認識方法および画像認識装置
【課題】 初期の位置合わせができなければ,位置ずれ分がすべて差画像として計算されてしまうので,その差画像をもって認識することは不可能だった。
【解決手段】 対象物の映像信号から得られた濃淡画像の部分領域を選択し,前記選択された対象物の画像の部分領域と,あらかじめ保存してある教示画像の部分領域に対して,対象物の画像の部分領域における座標と,それと同じ座標を含む教示画像の複数の座標点の間で輝度差分の絶対値をとり,そのうち最も小さい値を,その座標における輝度値として第1出力画像を作成し,前記第1出力画像が,輝度値ゼロの画像に近い場合,対象物の画像の部分領域と教示画像の部分領域が同一であると判定し,そうでなければ双方が異なったものであると判定する
(もっと読む)
161 - 169 / 169
[ Back to top ]